Projeto Curve Follow
O senhor pode fazer com que um robô siga curvas no espaço 3D usando um Projeto de Seguimento de Curvas (CFP). As curvas no RoboDK podem ser selecionadas a partir das bordas do objeto ou importadas como uma lista de pontos em arquivos CSV. Um projeto de acompanhamento de curvas é útil para algumas operações de fabricação, como soldagem, rebarbação, polimento ou pintura por robôs, por exemplo.
Para trabalhar com um CFP, siga este procedimento:
1.Clique em Utilities➔ Curve Follow Project para abrir as configurações de acompanhamento de curva. Essas configurações são as mesmas de um projeto de usinagem de robô, a única diferença é que a entrada Path é predefinida como Select curve (Selecionar curva).
2.Clique no botão Select curve (Selecionar curva) para selecionar a(s) curva(s) na tela.

3.Selecione as curvas com um clique esquerdo do mouse. Selecionar a mesma curva duas vezes trocará a direção do movimento. Além disso, clicar com o botão direito do mouse em uma curva previamente selecionada permite trocar o sentido do movimento ou desmarcar uma curva previamente selecionada.

Clique com o botão direito do mouse na janela 3D e selecione Done (Concluído) ou pressione a tecla Esc para voltar ao menu de configurações. O caminho verde exibirá o movimento do robô em relação ao objeto.
4.O senhor pode selecionar Update para ver se consegue criar um programa de robô com as configurações padrão. Se o programa tiver sido gerado com sucesso, o senhor verá uma marca de seleção verde. O senhor pode então selecionar Simulate (Simular) ou clicar duas vezes no programa gerado para ver o início da simulação.
Opções adicionais estão disponíveis no canto superior direito das configurações, como a velocidade da ferramenta e se os movimentos de aproximação/retração devem ser aplicados a cada curva. As configurações padrão são mostradas na imagem a seguir:

O programa pode ser ainda mais personalizado e otimizado usando os mesmos recursos mostrados na seção de usinagem do robô.
Extrair recursos de objetos 3D
As curvas podem ser extraídas das características dos objetos 3D importados para o RoboDK, selecionando Tools➔ Create Curves.

Um painel aparecerá no lado esquerdo da janela do RoboDK. O senhor poderá extrair curvas enquanto esse painel estiver ativo e a opção "Auto extract curves" estiver ativada.

O senhor pode passar o cursor sobre o objeto 3D do qual deseja extrair a curva. Uma linha azul fina e clara aparecerá para representar a curva. As setas brancas em diferentes pontos representam a normal da curva, ou seja, a direção da qual a ferramenta se aproximará.

É possível alterar a orientação das normais da curva (direção de aproximação) deslocando levemente o mouse na vertical ou na horizontal. O tamanho padrão do passo é de 15 graus e é controlado pela opção "Tilt step (deg)" (Passo de inclinação (graus)) no painel Create Curve (Criar curva).
Quando tiver identificado a curva correta, clique nela sem deslocar o mouse. Repita o procedimento até selecionar todas as curvas que deseja usar em um projeto Curve Follow.

O RoboDK inclui diferentes ferramentas para ajudar o senhor a modificar as curvas mesmo depois de extraí-las. Se quiser simplesmente modificar a normal, o senhor pode fazer isso acessando Tools➔ Modify Curves. Esse recurso permitirá que o senhor altere as normais de qualquer curva criada anteriormente.
Curvas de importação
O RoboDK pode criar ou obter curvas de uma variedade de fontes. A lista a seguir mostra exemplos de ferramentas que criarão uma curva que pode ser usada em um projeto Curve Follow:
a.Extrair características de um objeto 3D importado para o RoboDK.
b.Importar um CSV arquivo contendo a curva.
c.Importar uma curva usando um plug-in CAD/CAM.
d.Importar curvas de um arquivo SVG ou DXF.
e.Usando o aplicativo Surface Pattern Generator
f.Uso da API do RoboDK para integração com aplicativos externos.
g.Usando uma sonda manual, como o RoboDK TwinTrack
Importar um arquivo CSV
As curvas podem ser importadas no RoboDK a partir de um arquivo CSV ou de um arquivo de texto, selecionando Utilities➔ Import Curve. Um novo item aparecerá na estação mostrando a curva como um objeto.


O arquivo pode ser um arquivo de texto com as coordenadas 3D de cada ponto da curva. Opcionalmente, a orientação do eixo Z da ferramenta pode ser fornecida como um vetor i,j,k. Todas as coordenadas devem ser relativas ao sistema de coordenadas da peça.
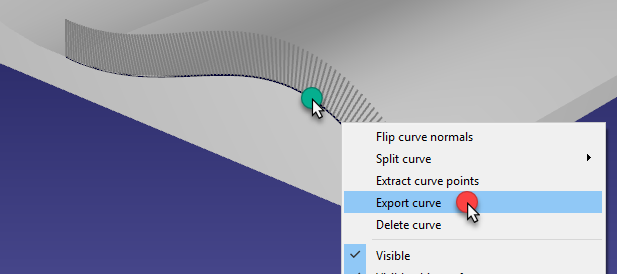
Opcionalmente, as curvas existentes de um objeto podem ser exportadas como um arquivo CSV (clique com o botão direito do mouse em uma curva e, em seguida, selecione Exportar curva), modificadas e reimportadas no RoboDK.
Mais informações e exemplos sobre como personalizar a importação de arquivos CSV ou TXT como curvas ou pontos estão disponíveis na seção de exemplos da API do RoboDK.