Projeto Seguimento de Pontos
Você pode simular facilmente um robô para seguir pontos com o RoboDK. Os pontos no RoboDK podem ser extraídos de objetos, curvas ou importados como uma lista de pontos em arquivos CSV. Essa opção é útil para aplicações de soldagem por pontos ou perfuração, por exemplo. O vídeo a seguir mostra um exemplo de configuração de um aplicativo de solda por pontos: assista ao vídeo.
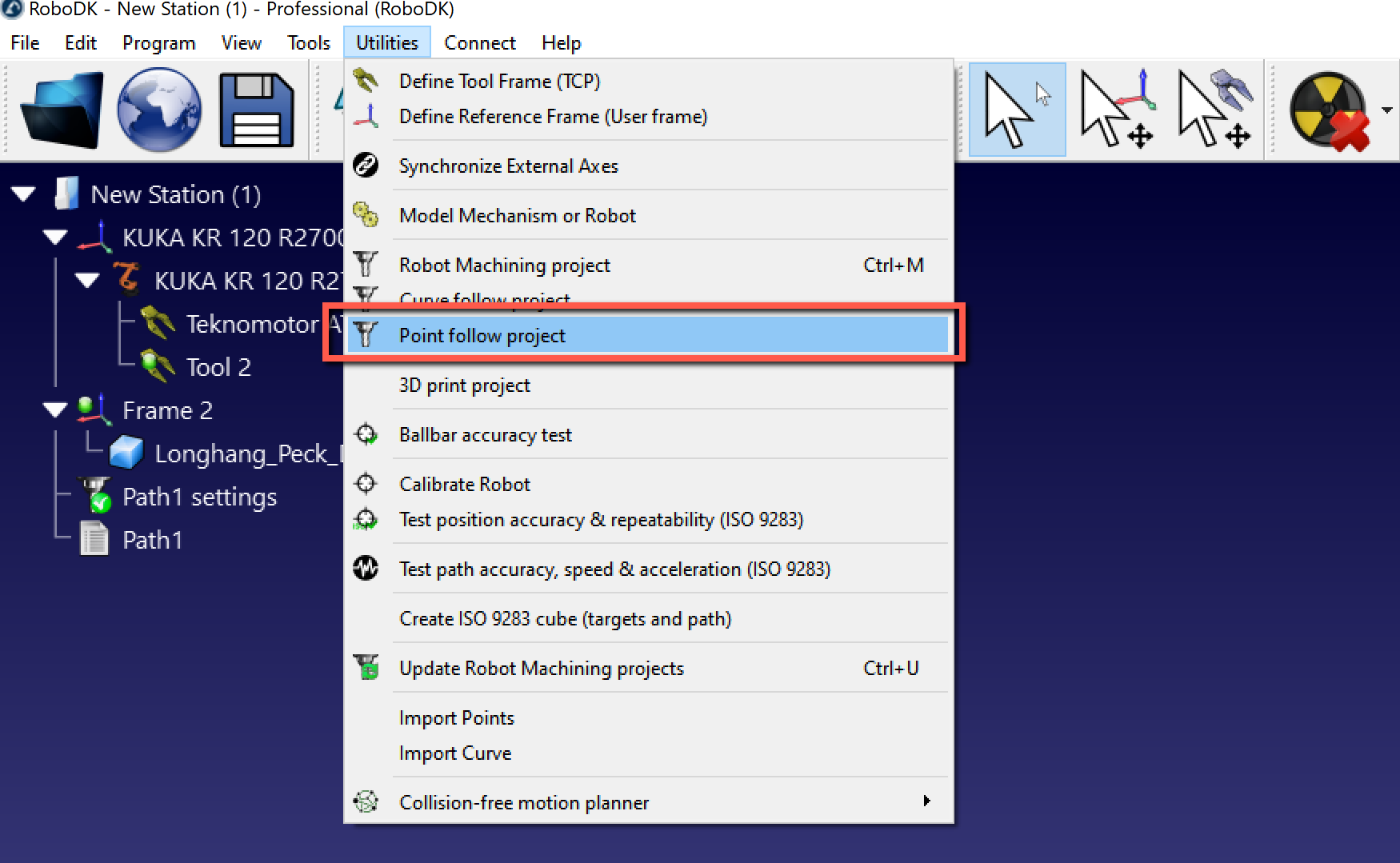
Selecione Utilitários➔ Projeto de Seguimento de Pontos para abrir as configurações de seguimento de ponto. Essas configurações são as mesmas de um projeto de usinagem com robô, a única diferença é que a Seleção de trajetória é predefinida como Selecionar pontos.
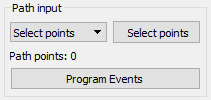
Selecione Selecionar pontos para selecionar o(s) ponto(s) na tela.
Selecione os pontos com um clique esquerdo do mouse. Selecionar o mesmo ponto duas vezes mudará a direção da aproximação. Além disso, clicar com o botão direito do mouse em um ponto permite selecionar os pontos seguintes, selecionando Selecionar próximo.
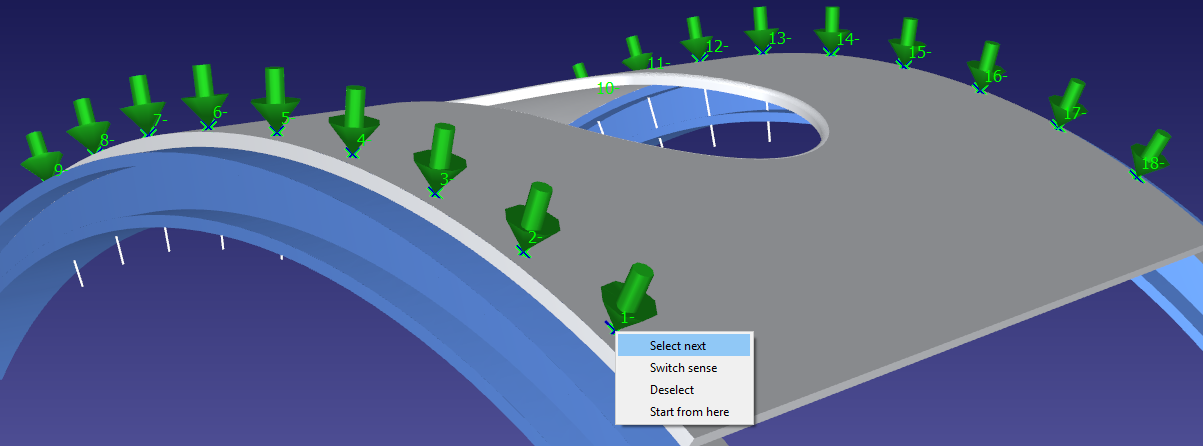
Clique com o botão direito do mouse na tela e selecione Concluído ou pressione a tecla Esc para voltar ao menu de configurações. O caminho verde exibirá o movimento do robô em relação ao objeto.
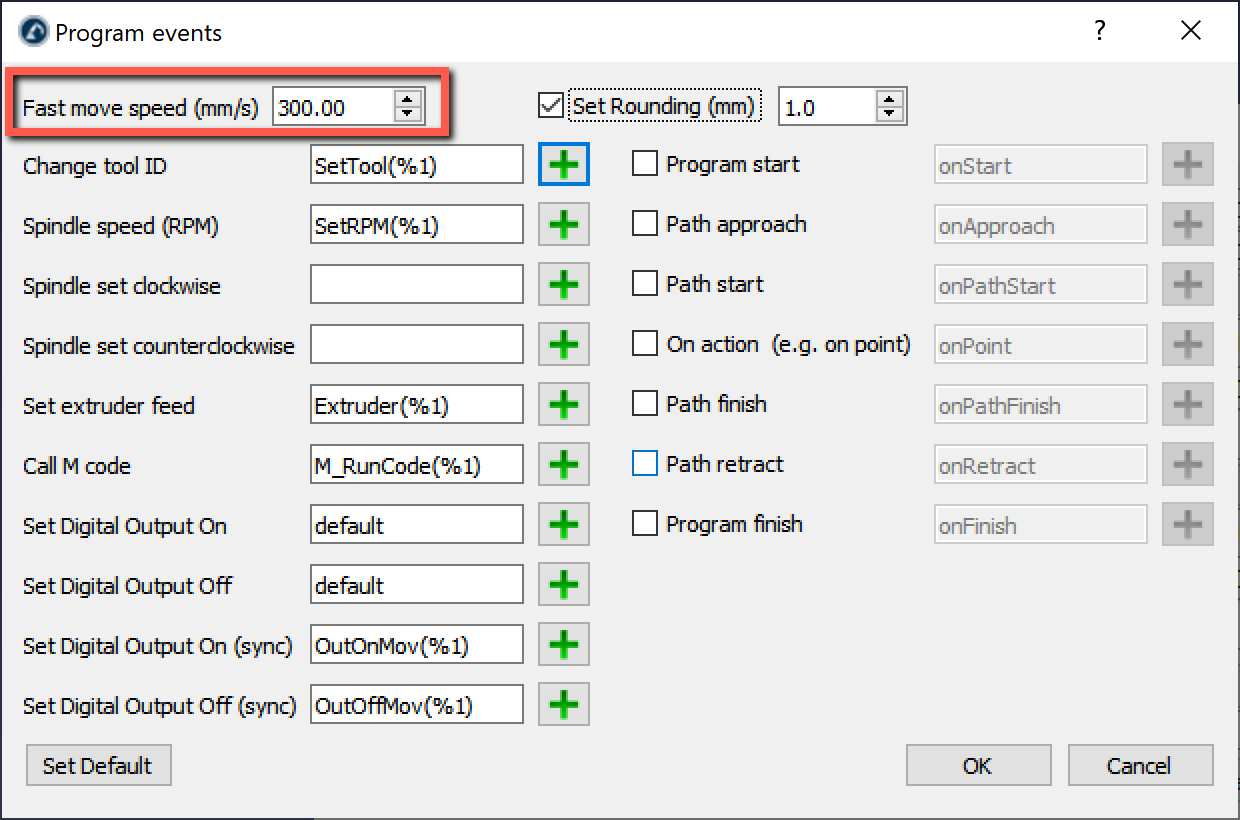
Algumas opções adicionais estão disponíveis no canto superior direito das configurações, como a velocidade da ferramenta e a distância de aproximação. As configurações padrão são mostradas na próxima imagem:

Importação de Pontos
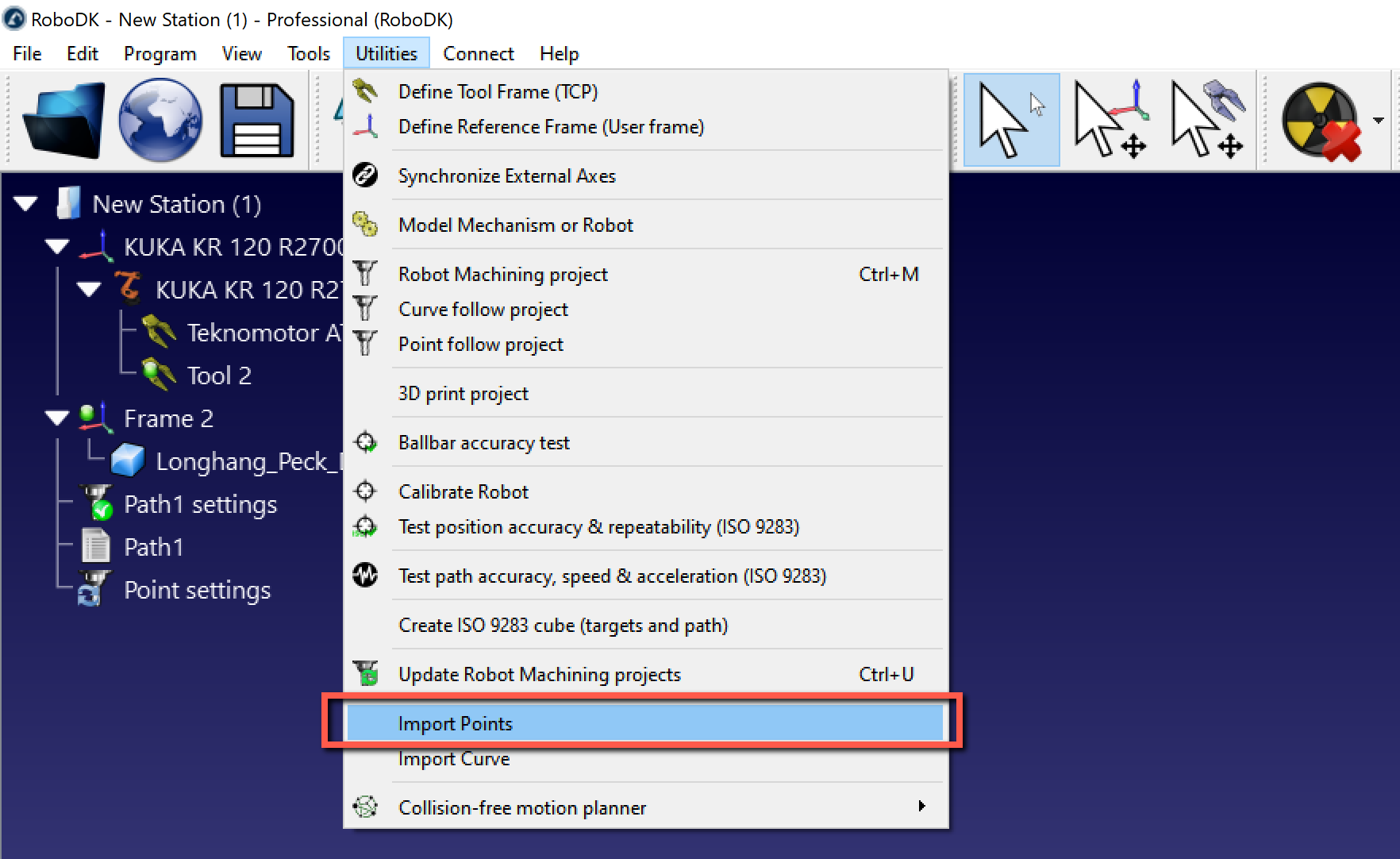
Uma lista de pontos pode ser importada de um arquivo de texto ou de um arquivo CSV, selecionando Utilitários➔ Importar pontos. Um novo item aparecerá na estação mostrando os pontos como um objeto.
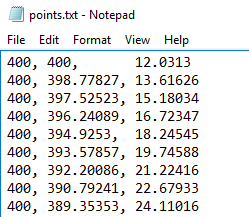
O arquivo pode ser um arquivo de texto com as coordenadas 3D de cada ponto da curva. Opcionalmente, a orientação do eixo Z da ferramenta pode ser fornecida como um vetor i,j,k.
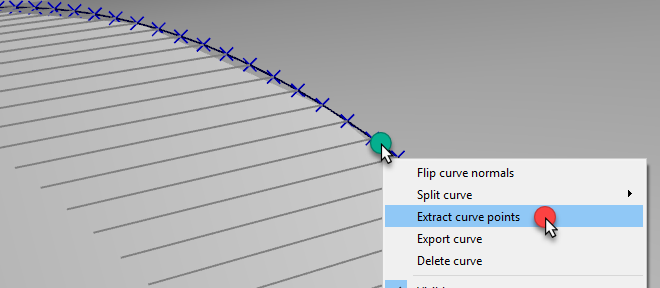
Opcionalmente, as curvas existentes de um objeto podem ser convertidas em pontos clicando com o botão direito do mouse em uma curva e, em seguida, selecionando Extrair pontos de curva.