Projeto de Usinagem com robôs
Siga estas etapas para configurar um novo projeto de usinagem com robô no RoboDK com um arquivo NC gerado por um software CAM (como o código G ou APT):
1.Selecione Utilitários➔
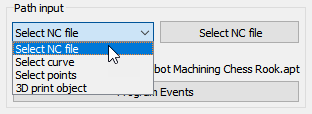
Uma nova janela será exibida, como mostra a imagem.
2.Selecione Selecionar arquivo NC na seção Seleção de trajetória
3.Forneça um arquivo NC, como o arquivo de usinagem APT a seguir:
C:/RoboDK/Library/Example-02.e-Robot Machining Chess Rook.apt
4.Renomeie o projeto de usinagem com robô para Machining Settings clicando com o botão direito do mouse no novo item da árvore e selecionando Renomear (F2).
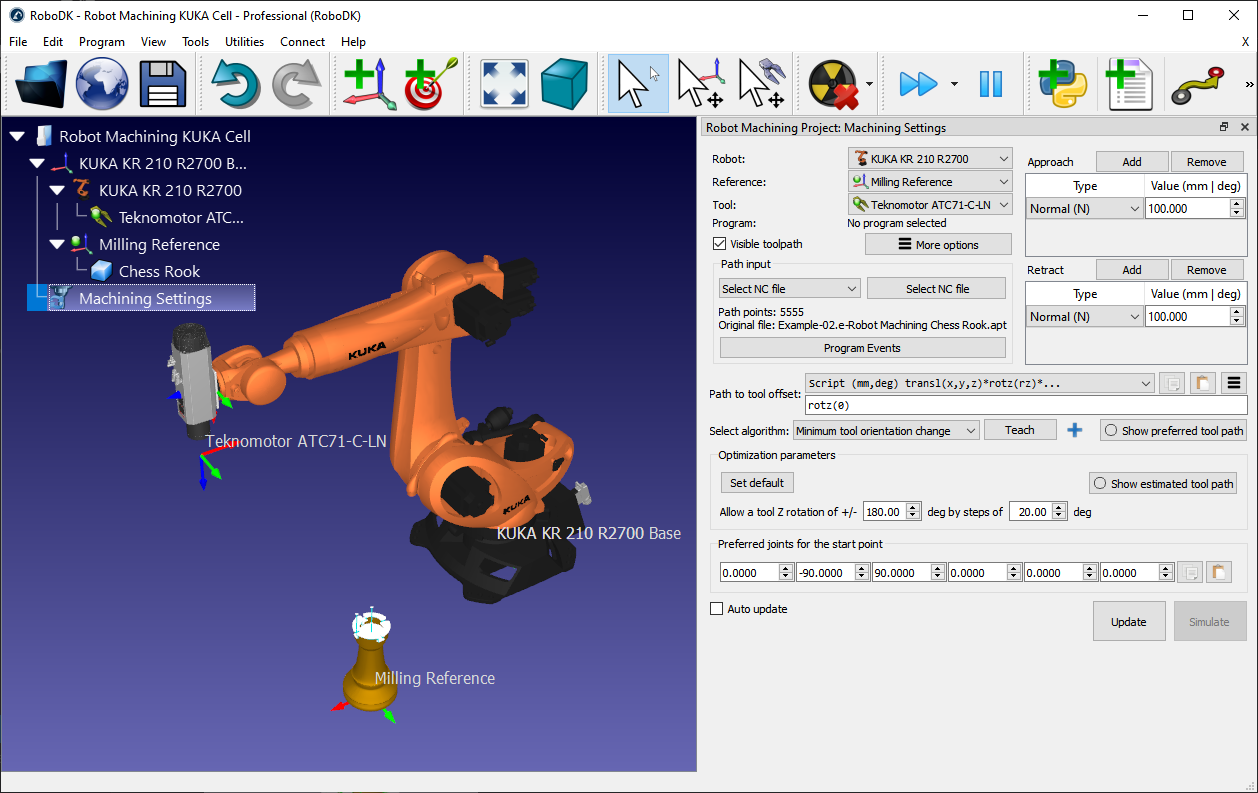
Selecione o robô, o frame de referência e a ferramenta na seção superior esquerda do menu, conforme mostrado na imagem a seguir. A trajetória da ferramenta deve ser exibida em verde com relação ao sistema de coordenadas correto.
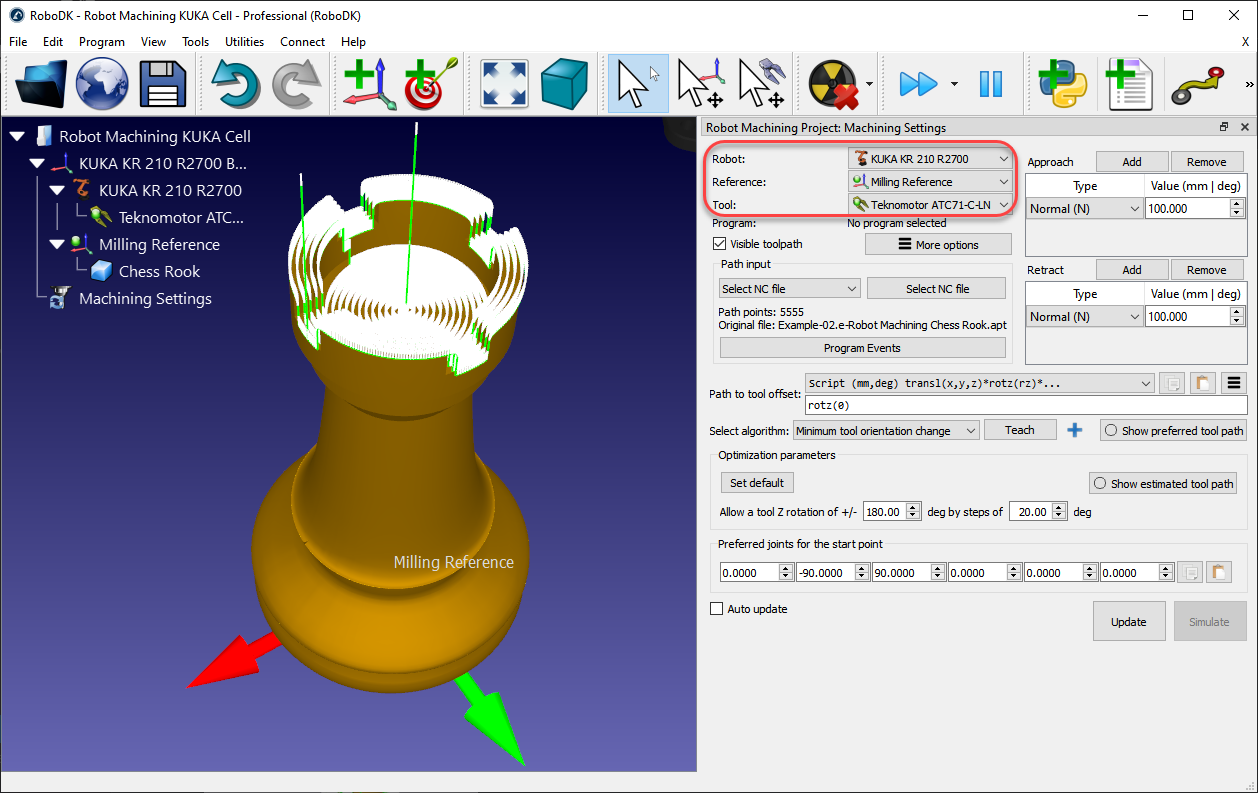
A trajetória da ferramenta de usinagem é exibida em verde e as normais do caminho são mostradas em vetores brancos. Desmarque Trajetória visível para ocultar a trajetória da ferramenta.
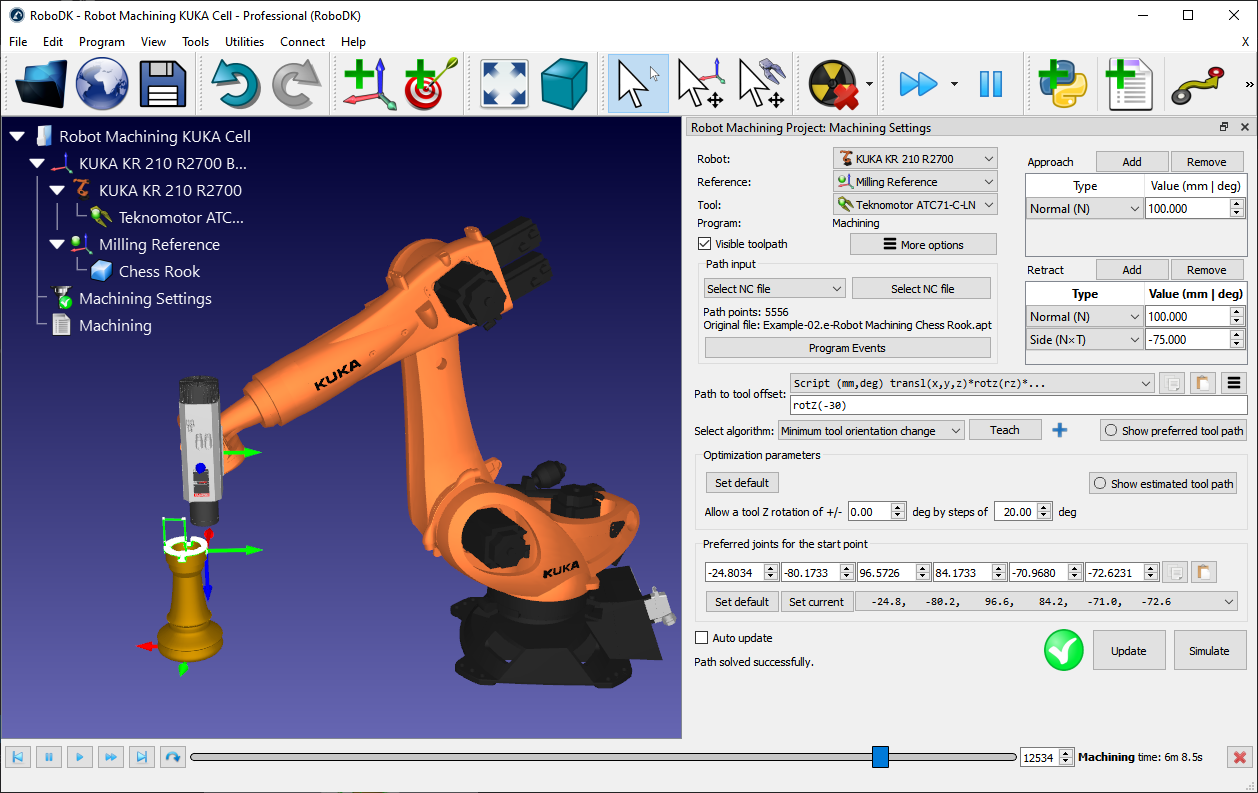
você pode selecionar Atualizar para ver se consegue criar um programa de Usinagem com robôs com as configurações padrão. Se o programa tiver sido gerado com sucesso, você verá uma marca de seleção verde. Você pode então selecionar Simular ou clicar duas vezes no programa gerado para ver o início da simulação.
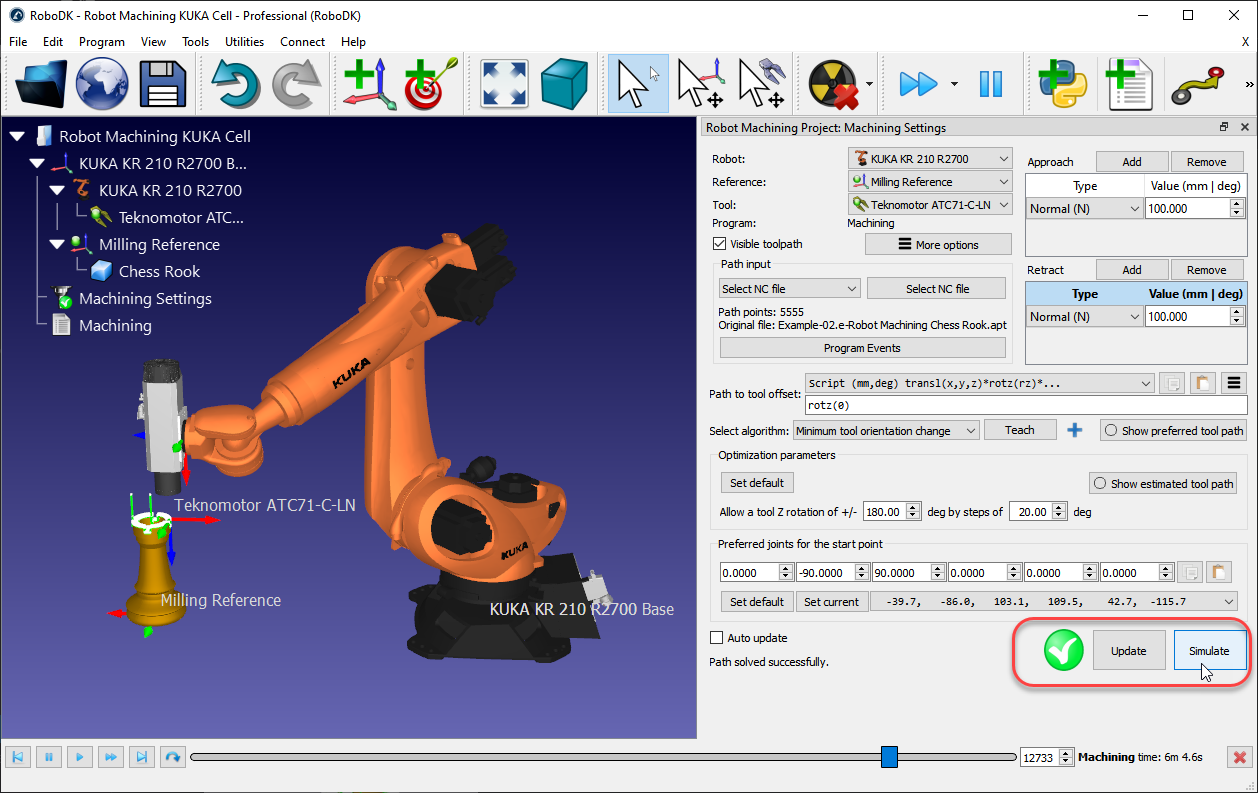
Se você vir uma cruz vermelha com uma mensagem de aviso, isso significa que o programa de usinagem com robô não é viável. Talvez você tenha que alterar algumas configurações, como a orientação da ferramenta, os parâmetros de otimização, o ponto inicial ou a localização da peça.
As seções a seguir fornecem mais informações sobre como personalizar as configurações de usinagem com robô.
Seleção de trajetória
A Seleção de trajetória permite que você selecione diferentes maneiras de fornecer um caminho de ferramenta.
●Selecione o arquivo NC: Como um arquivo NC (obtido do software CAM), conforme descrito nesta seção.
●Selecione a curva: Como uma ou mais curvas, conforme descrito na seção Projeto de Seguimento de Curva.
É possível importar curvas como uma lista de coordenadas no RoboDK.
●Selecionar pontos: Um ou mais pontos, conforme descrito na seção Projeto de Seguimento de Pontos.
É possível importar pontos como uma lista de coordenadas no RoboDK.
●Objeto de impressão 3D: Como um objeto para impressão 3D. Um fatiador é usado para converter a geometria em um caminho de ferramenta
Eventos do programa
Selecione Eventos de Programa para exibir eventos especiais que precisam ser levados em conta ao gerar programas de robôs. Isso inclui acionar uma troca de ferramenta, definir a velocidade do fuso em RPM ou acionar programas específicos no início ou no fim do programa.
Você pode especificar um valor de arredondamento nos eventos do programa. Isso criará automaticamente uma instrução de arredondamento no início do programa e ajudará a tornar os programas de usinagem com robô mais suaves, evitando que o robô trema. Por exemplo, em um robô ABB, isso definirá o valor ZoneData em mm, em um robô Fanuc, isso definirá o valor CNT como uma porcentagem e, nos controladores Universal Robots, definirá o valor de curva em mm.
Se você estiver usando arquivos G-code ou NCI, os códigos M customizados serão acionados por padrão como chamadas de função para M_RunCode (o código M é passado como parâmetro). Você pode remover as chamadas M personalizadas excluindo a chamada para M_RunCode.
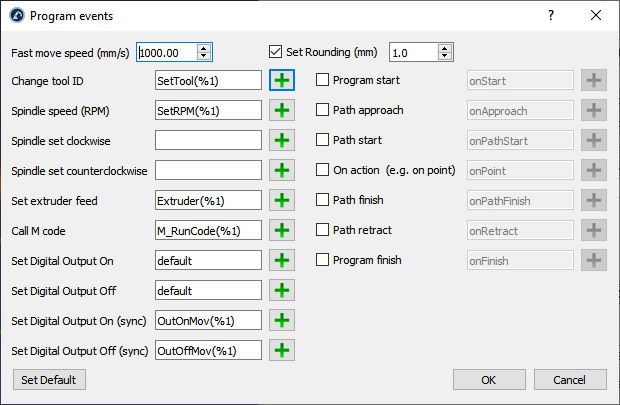
Mova o cursor do mouse sobre o campo correspondente para obter mais informações sobre como personalizar cada seção.
Por exemplo, ao alterar a ferramenta, você pode usar o valor %1 para representar a ID da ferramenta fornecida pelo software CAM. Se você preferir acionar funções estáticas em vez de passar argumentos, pode substituir SetTool(%1) por SetTool%1. Ao usar a ferramenta 2, isso geraria SetTool2 em vez de SetTool(2).
Approach/Retract
Você pode personalizar os movimentos de aproximação e retração no canto superior direito do menu de usinagem com robô. Por padrão, o RoboDK adiciona movimentos de aproximação e retração de 100 mm ao longo da normal.
Selecione Adicionar para adicionar um movimento de retração adicional. O caminho verde será atualizado de acordo. É possível selecionar entre mover-se ao longo de um eixo específico, fornecer coordenadas, ter uma aproximação em arco, etc. Você também pode combinar vários movimentos de aproximação/retração selecionando o botão Adicionar.
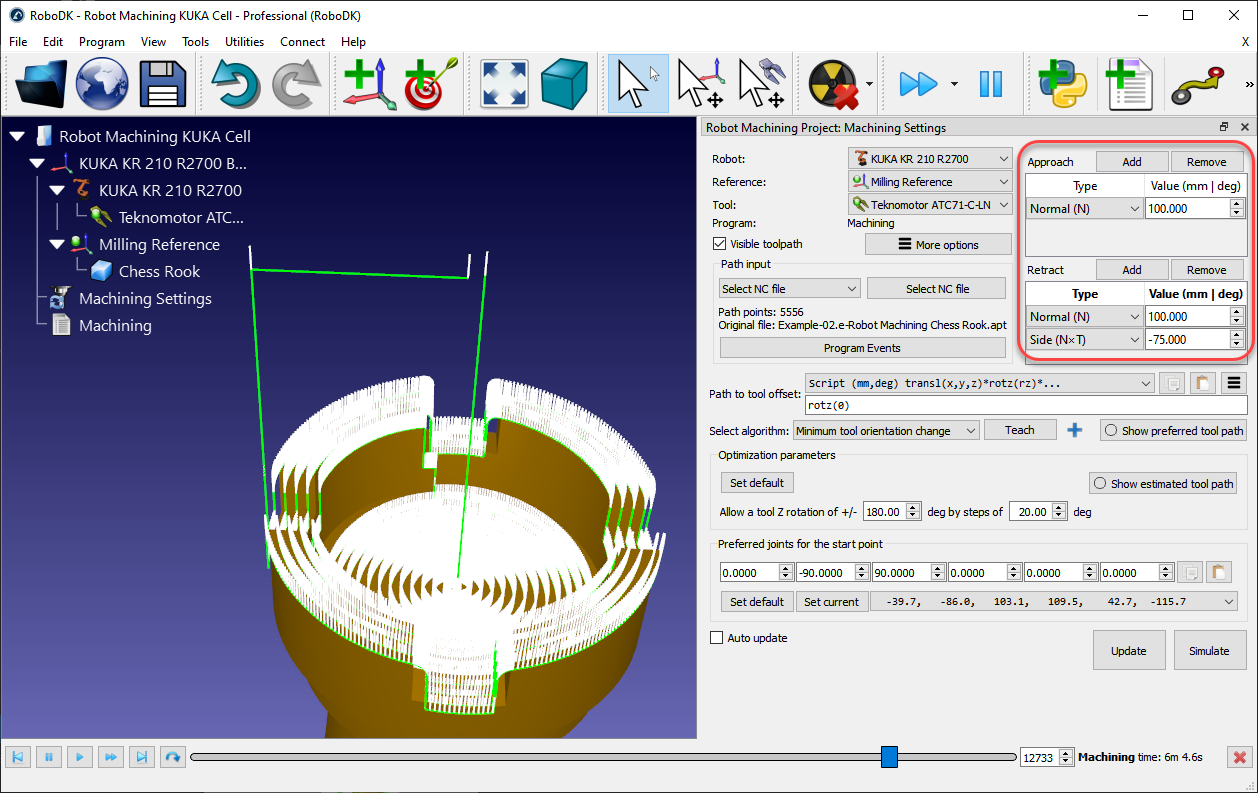
Selecione Remover para remover um movimento específico de aproximação ou retração.
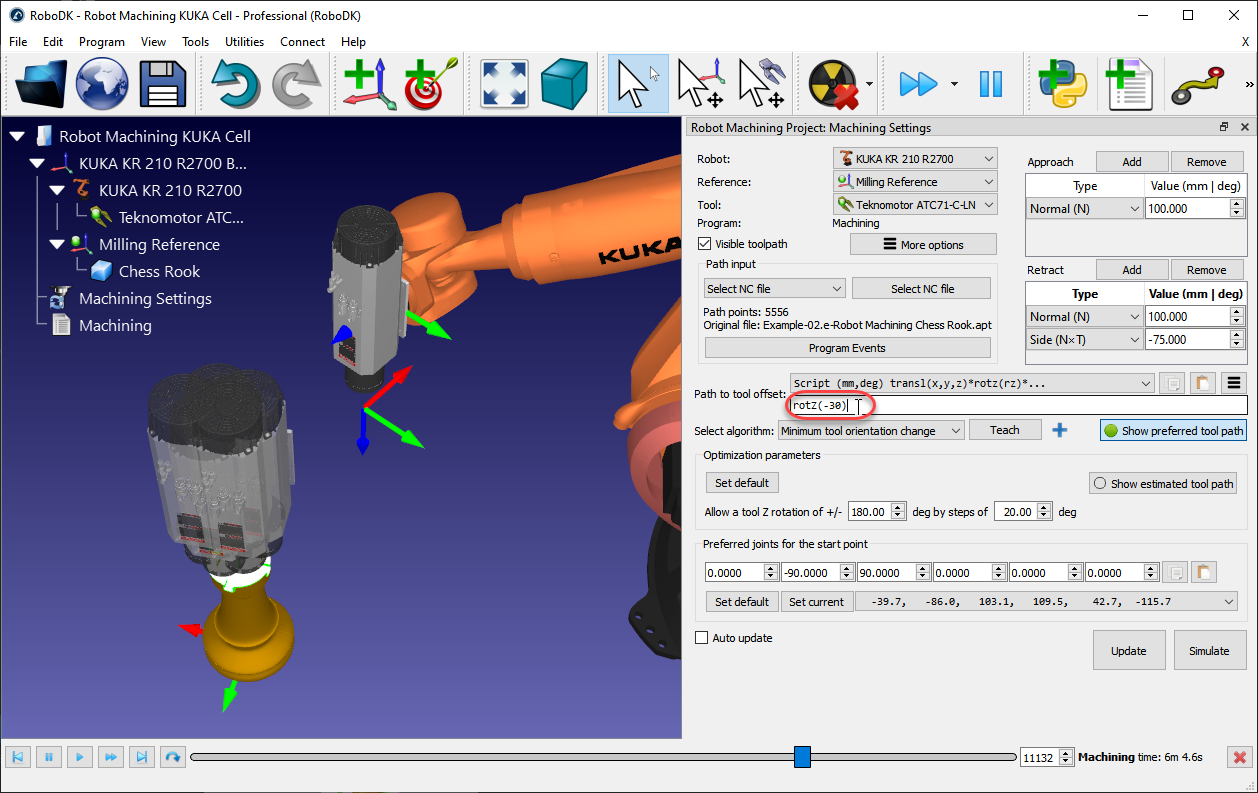
Caminho para o deslocamento da ferramenta
O desvio do caminho para a ferramenta permite alterar a orientação preferencial da ferramenta ao longo da trajetória da ferramenta. Essa opção é usada principalmente para girar a ferramenta em torno do eixo Z do TCP. Isso permite lidar com o 6º sexto grau de liberdade em torno do eixo da ferramenta. São oferecidas várias opções, dependendo do aplicativo e de seus requisitos. Por exemplo, você pode optar por minimizar a orientação da ferramenta ou seguir a orientação da ferramenta ao longo do caminho.
Como um robô de 6 eixos é usado para seguir um programa de fabricação CNC de 3 ou 5 eixos, temos um grau adicional de liberdade a ser definido. Esse grau de liberdade geralmente é a rotação em torno do eixo Z do TCP. Esse grau de liberdade adicional é especialmente útil para evitar singularidades, limites de juntas, colisões ou problemas de acessibilidade.
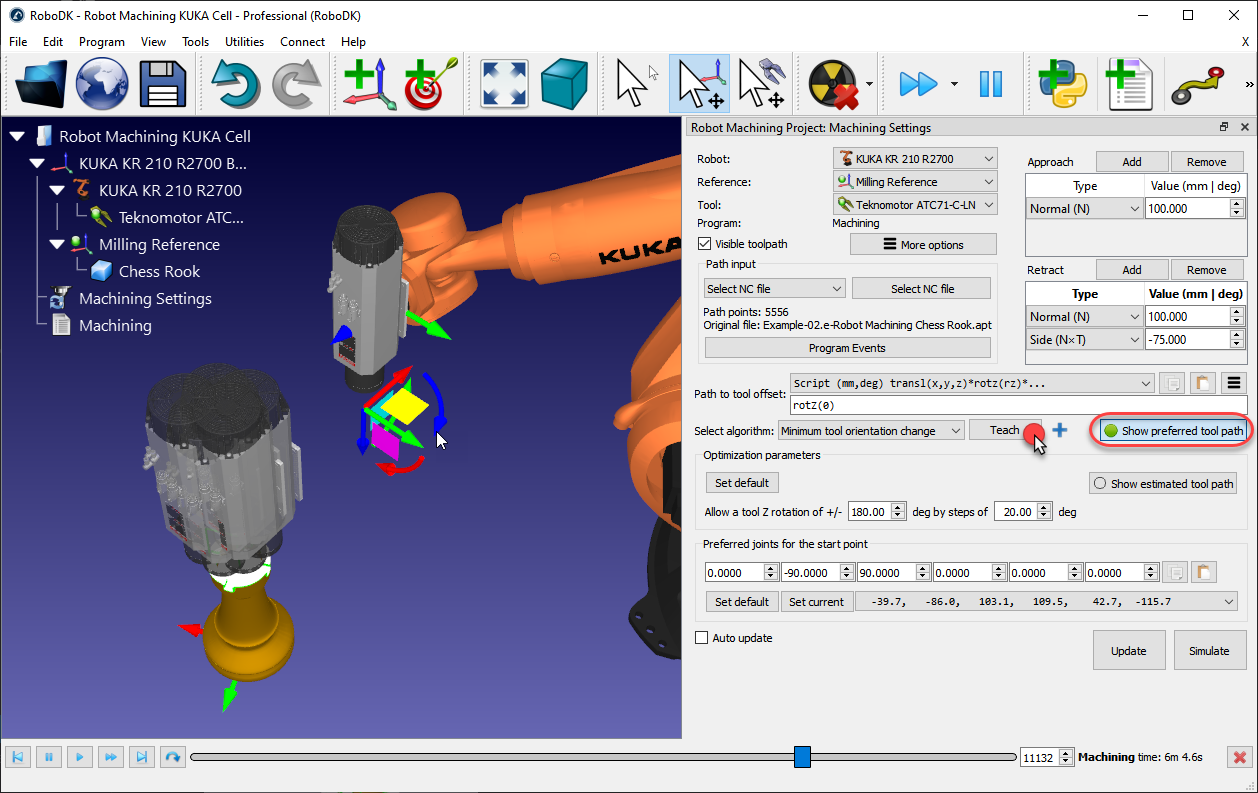
Por padrão, o caminho para o deslocamento da ferramenta exibe uma transformação rotz(0). Isso significa que você pode adicionar uma rotação adicional em torno do eixo Z da ferramenta. Esse valor pode ser modificado para estabelecer a orientação preferencial da ferramenta, modificando a orientação em torno do eixo Z do TCP ou em combinação com outros eixos. A orientação preferencial é a orientação que o robô tentará manter ao seguir A trajetória da ferramenta.
Por padrão, o RoboDK usa o algoritmo de mudança mínima de orientação da ferramenta. Isso significa que a orientação da ferramenta é mantida o mais constante possível ao longo do percurso da ferramenta. Em geral, essa opção é adequada para operações de fresagem, pois minimiza os movimentos das juntas do robô. Como alternativa, outros algoritmos/métodos estão disponíveis, como a orientação da ferramenta seguindo a trajetória da ferramenta (útil para aplicações de corte, em que a lâmina precisa permanecer tangente ao longo do caminho), ou o robô segurando o objeto se a trajetória da ferramenta precisar ser seguido anexado à ferramenta do robô (por exemplo, para aplicações de distribuição ou polimento, também conhecidas como configurações de TCP remoto).
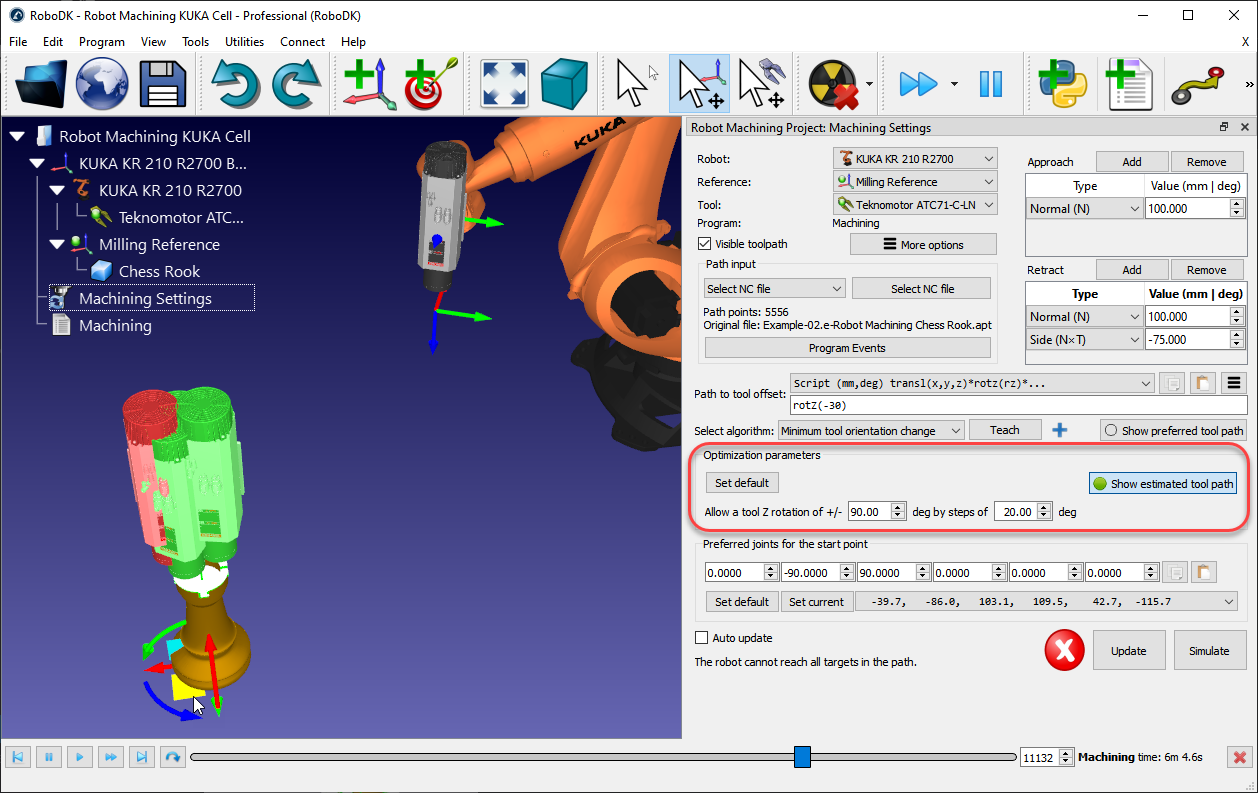
Parâmetros de otimização
Dada uma orientação preferencial da ferramenta, o robô pode ter certa liberdade para girar em torno do eixo Z da ferramenta. Isso permite que o robô resolva o programa evitando as singularidades do robô, os limites das juntas e garantindo que todos os pontos sejam alcançáveis. Por padrão, o RoboDK permite que a ferramenta gire até +/-180 graus em torno do eixo TCP em incrementos de 20 graus.
Recomenda-se restringir essa rotação dependendo do aplicativo. Por exemplo, é possível inserir +/-90 graus para restringir a rotação permitida pela metade. Diminuir esse parâmetro também reduzirá o tempo de processamento para obter o programa.
Se alguns pontos do caminho não puderem ser alcançados, é recomendável girar o frame de referência ou ser mais permissivo com a rotação Z da ferramenta. O frame de referência pode ser movido mantendo-se pressionada a tecla Alt e arrastando o sistema de coordenadas para melhor ajustar a peça dentro do espaço de trabalho do robô.
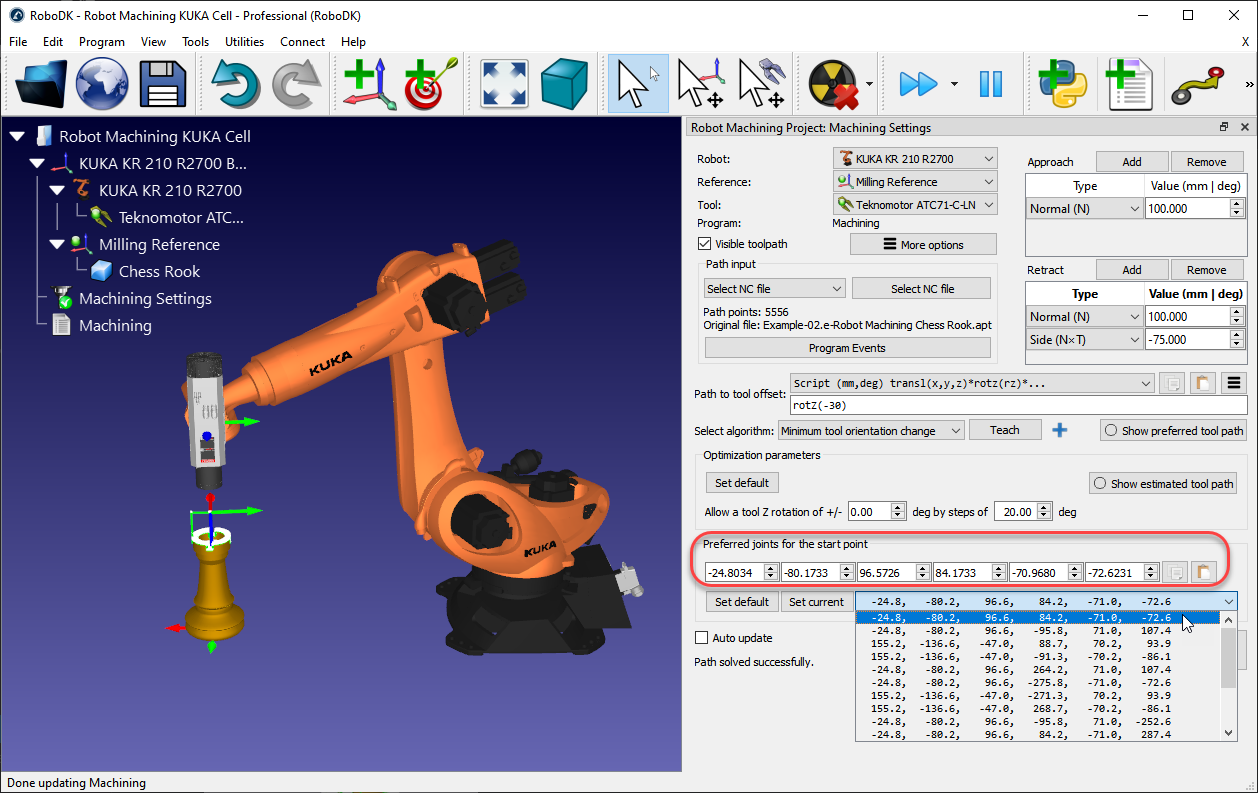
Configuração preferida
O RoboDK seleciona automaticamente a configuração inicial que está mais próxima das posições de eixo iniciais preferidas. A partir desse ponto, o robô seguirá movimentos lineares, de modo que a configuração do robô não será alterada.
Um menu suspenso exibirá todas as soluções possíveis para iniciar o programa. Se necessário, selecione a configuração preferida da junta do robô e selecione Atualizar para recalcular o programa.
Atualização de programa
Selecione Atualizar para gerar o programa do robô de acordo com as configurações fornecidas. Uma marca de seleção verde será exibida se o programa puder ser criado com sucesso. Em seguida, você verá um novo programa na estação chamado Usinagem.
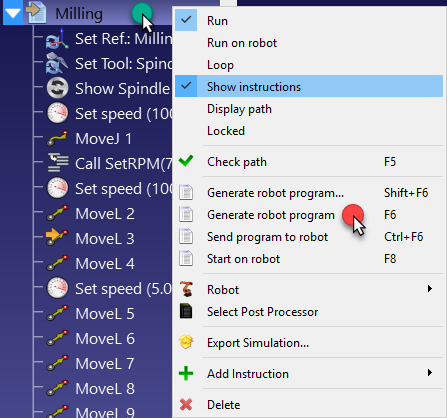
Clique duas vezes no programa
Clique com o botão direito do mouse no programa e selecione Gerar programa de robô (F6) para gerar o programa do robô. Para obter mais informações sobre a geração de programas, consulte a seção Programa.