Definir o valor de arredondamento
Selecione Programa ➔
Sem uma instrução de arredondamento, o robô atingirá a velocidade de 0 no final de cada movimento (a menos que o próximo movimento seja tangente ao movimento anterior). Isso provocará altas acelerações e mudanças rápidas de velocidade para garantir a melhor precisão para cada movimento.
Esse valor também é conhecido como Blending radius (Universal Robots), ZoneData (robôs ABB), CNT/FINE (robôs Fanuc), Cornering (robôs Mecademic) ou $APO.CDIS/$APO.CPTP/Advance (robôs KUKA).
Alguns controladores exigem a definição desse valor como uma porcentagem; por exemplo, em um controlador Fanuc, se você quiser fornecer o comando CNT5, deve inserir o valor 5.
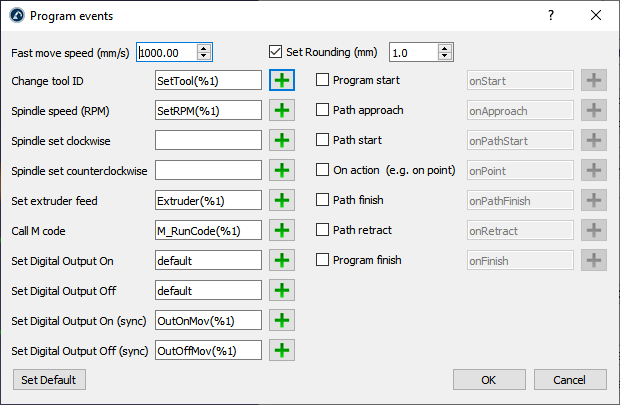
Você também pode especificar o parâmetro de arredondamento na janela Eventos de Programase estiver gerando seus programas para usinagem com robôs, impressão 3D ou seguimento de curva/ponto.
Os testes de precisão de trajetória do RoboDK podem permitir uma melhor compreensão dos efeitos de diferentes estratégias de arredondamento.