Definir/aguardar IO
Selecione Programa ➔
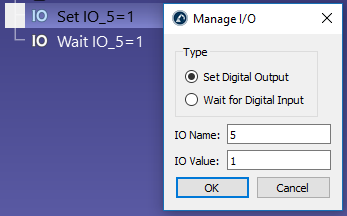
O Nome de I/O pode ser um número ou um valor de texto se for uma variável nomeada. O Valor de I/O pode ser um número (0 para Falso e 1 para Verdadeiro) ou um valor de texto se for um estado nomeado.
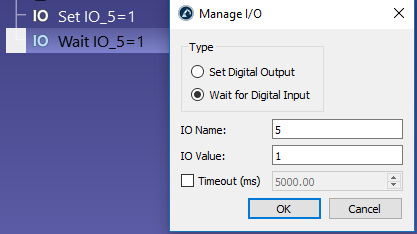
Defina Aguardar por Entrada Digital para interromper a execução do programa até que uma entrada específica mude para um valor específico. Além disso, a maioria dos controladores de robôs suporta um atraso de tempo limite para gerar um erro se o tempo de espera exceder um valor específico. Marque a opção Timeout (ms) para ativar esse recurso.
A alteração das entradas e saídas digitais simuladas criará novas variáveis de estação. Para verificar o estado dessas variáveis, você pode clicar com o botão direito do mouse na estação e selecionar Parâmetros da estação. Também é possível ler ou modificar essas variáveis por meio da API.