Quando você tiver um programa pronto para ser exportado para o robô, poderá gerar o arquivo de programa exigido pelo controlador do robô.
Siga estas etapas para gerar um programa de robô:
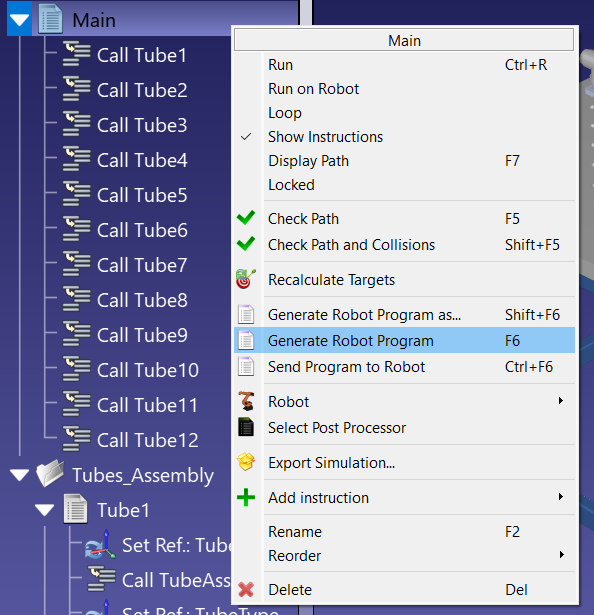
1.Clique com o botão direito do mouse em um programa.
2.Selecione Gerar Programa de Robô (F6).
Em seguida, você verá o programa do robô exibido em um editor de texto.
Observação: Você também pode selecionar Programa ➔ Gerar Programa(s) (F6) para gerar um ou mais programas de robô quando tiver um ou mais programas selecionados.
Dica: mantenha pressionada a tecla Control (Ctrl) para selecionar vários programas ao mesmo tempo e gerá-los todos de uma vez.
Por padrão, os programas do robô são salvos na pasta Documentos (C:/Users/Your Name/Documentos/RoboDK/Programs/). Você pode alterar essa pasta selecionando Ferramentas ➔ Opções, selecione a guia Programa e clique em Definir ao lado da pasta Programas do robô.
Observação: É uma prática recomendada para alguns controladores de robôs integrar o programa gerado e os subprogramas necessários no mesmo arquivo de programa. O RoboDK já cuida desse detalhe e você deve ver os subprogramas incluídos no seu programa principal para os controladores de robôs que suportam esse recurso (por exemplo: ABB, Universal Robots ou controladores KUKA). Por outro lado, para robôs que não suportam esse recurso, você terá de gerar vários arquivos e transferi-los para o controlador do robô para executar corretamente todos os programas (por exemplo, nos controladores Fanuc ou Yaskawa/Motoman). Alguns pós-processadores permitem que você configure esse comportamento. Você pode encontrar mais configurações em Ferramentas ➔ Opções e selecionar a guia Programa.
Como alternativa, você também pode clicar com o botão direito do mouse em um programa e selecionar Gerar Programa de Robô em ... (Shift+F6) para gerar o programa especificando o local onde gostaria de salvá-lo.