Movimento Linear
Selecione Programa ➔
A menos que um ponto seja selecionado antes de adicionar a instrução, a instrução de movimento criará um novo ponto e eles serão vinculados. Se o ponto for movido, o movimento também será modificado.
Os movimentos joint e os movimentos lineares se comportam da mesma forma e podem ser facilmente alternados de um tipo para o outro.
Da mesma forma que a instrução Movimento Joint, se essa for a primeira instrução adicionada a um programa, mais duas instruções serão adicionadas antes da instrução de movimento: uma seleção de Frame de Referência e uma seleção de Frame de Ferramenta.
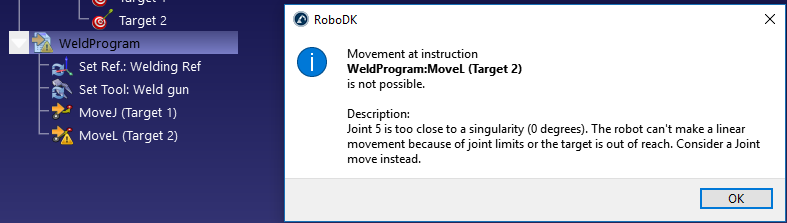
Ao contrário dos movimentos joint, os movimentos lineares são sensíveis às singularidades do robô e aos limites dos eixos. Por exemplo, os robôs de 6 eixos não podem atravessar uma singularidade após um movimento linear. A imagem a seguir mostra um exemplo que diz que o eixo 5 está muito próximo de uma singularidade (0 graus). [...] Em vez disso, considere um movimento Joint. Como mostrado na imagem a seguir.
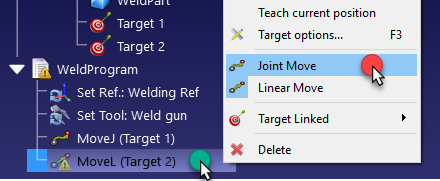
Se um movimento linear não for estritamente necessário, clique com o botão direito do mouse na instrução de movimento e altere-a para Movimento Joint.
Como alternativa, o ponto, o TCP ou a posição do frame de referência devem ser modificados para evitar a singularidade.