Pós-processadores vs. Drivers
Os pós-processadores e os drivers de robôs usam métodos diferentes para movimentar os robôs. Enquanto um pós-processador permite que você gere programas off-line, um driver permite que você se comunique em tempo real com o robô.
Um pós-processador é usado para programação off-line e é responsável por converter o programa do robô RoboDK na linguagem de programação nativa do controlador do robô associado. Por exemplo, o pós-processador ABB gera arquivos .mod para controladores IRC5. O pós-processador também inclui o upload do programa para o controlador do robô, geralmente por FTP. As seguintes funcionalidades de um programa são tratadas pelo pós-processador:
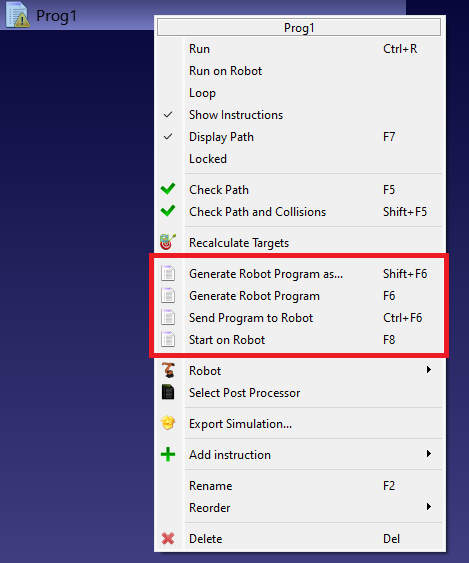
1.Gerar programa do robô
2.Gerar o programa do robô como...
3.Enviar programa para o robô
4.Partida no robô (em combinação com o motorista)
Um driver de robô permite o controle remoto do seu robô a partir do seu computador usando o RoboDK. Isso permite que você execute as instruções do programa do RoboDK no controlador do robô em tempo real. Isso inclui a capacidade de chamar programas remotos no controlador. Por exemplo, o driver ABB envia comandos de movimento por meio de comunicação de soquete. As seguintes funcionalidades são tratadas pelo driver:
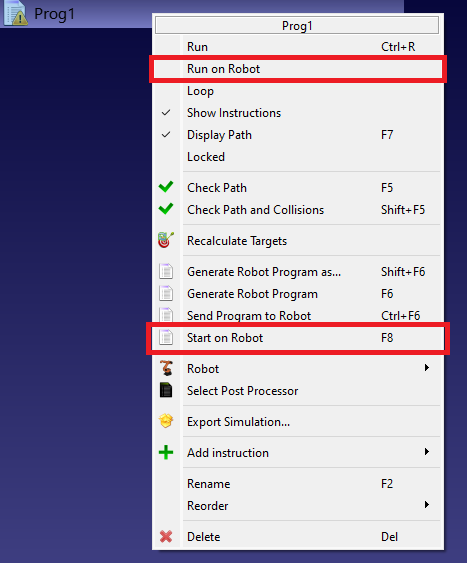
1.Ative a opção Executar no Robô e, em seguida, clique duas vezes para executar o programa no robô usando o driver.
2.Iniciar no Robô (em combinação com o pós-processador)