Selecionar o pós-processador
A conversão da simulação do RoboDK em um programa de robô específico é feita por um Pós-processador. O pós-processador define como os programas do robô devem ser gerados para um robô específico. Cada robô tem um pós-processador específico/default por padrão no RoboDK.
Para selecionar um pós-processador específico para um robô:
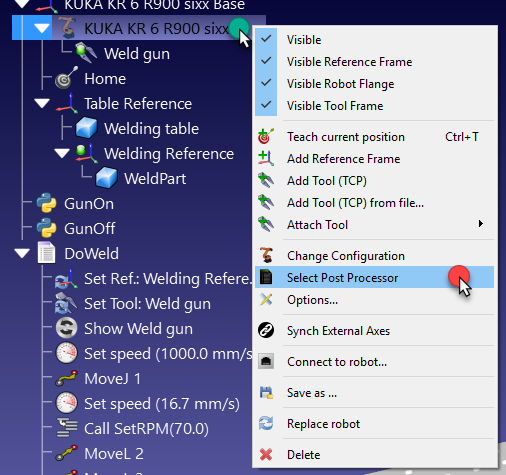
1.Clique com o botão direito do mouse em um robô ou programa.
2.Selecione Selecionar Pós-processador.
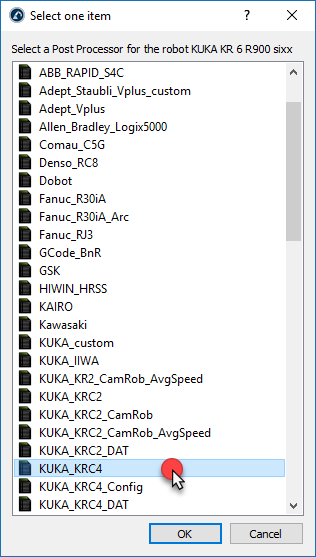
3.Escolha um pós-processador na lista.
4.Selecione OK.
A alteração foi aplicada e o programa pode ser gerado novamente para ver o resultado.
Os pós-processadores do RoboDK oferecem total flexibilidade para gerar programas de robôs para requisitos específicos. O RoboDK oferece pós-processadores para a maioria das marcas de robôs. Os pós-processadores podem ser facilmente criados ou modificados. Para obter mais informações sobre pós-processadores, consulte a seção dedicada aos pós-processadores.