Simulação de Eventos
Selecione Programa ➔
Os eventos de simulação que usam a interface gráfica do usuário permitem que você:
●Anexar ou desanexar objetos às ferramentas do robô
●mostrar ou ocultar objetos ou ferramentas
●alterar a posição de objetos e frames de referência
Por exemplo, se o robô se mover para um local específico para pegar um objeto, podemos configurar um evento Anexar objeto para mover esse objeto junto com o robô. Então, depois que o robô tiver se movido e estiver pronto para deixar os objetos, podemos configurar um evento Desanexar objeto para deixar quaisquer objetos que a ferramenta tenha pegado.
Anexar objeto
O evento de simulação de anexar objeto permite anexar um objeto a uma ferramenta para simular uma ação de captura (pick).
Quando a ação de anexar um objeto a uma ferramenta é acionada, o objeto mais próximo da ferramenta selecionada será anexado. Uma tolerância padrão de 200 mm é usada para ignorar quaisquer objetos mais distantes do que essa distância.
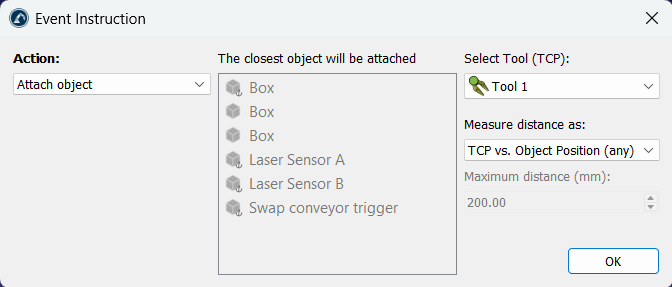
Se você não especificar uma tolerância de distância, o valor padrão global será usado (você pode alterar o padrão global em FerramentasOpçõesDistância máxima para anexar um objeto a uma ferramenta de robô). Além disso, por padrão, a distância é verificada a partir do local do TCP até a referência do objeto. Como alternativa, é possível usar a distância entre o TCP e a geometria do objeto selecionando Verificar a menor distância entre o TCP e a forma do objeto.
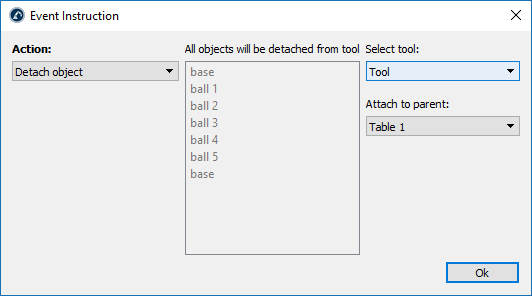
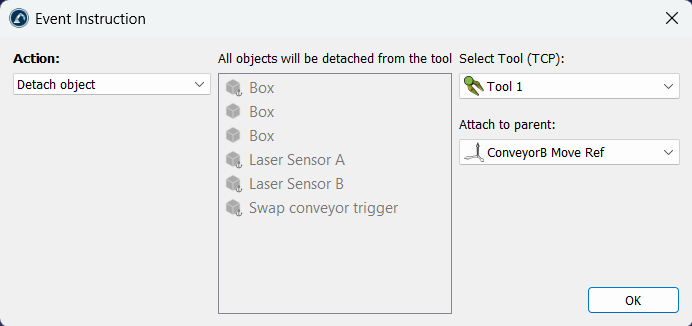
Desanexar objeto
O evento de simulação de desanexar objeto permite desanexar um objeto de uma ferramenta para outro objeto ou sistema de coordenadas.
Você deve escolher a ferramenta da qual os objetos devem ser desanexados e o sistema de coordenadas ou objeto ao qual os objetos devem ser anexados em seguida.
O evento de simulação de desanexar objeto permite simular uma operação de soltar/colocar em uma aplicação de pick and place (executando a ação oposta ao evento de anexar).
Por exemplo, se o robô se move até um local específico para pegar um objeto, podemos configurar um evento Anexar objeto para mover esse objeto junto com o robô. Depois que o robô tiver se movido e estiver pronto para soltar os objetos capturados, você pode acionar um evento Desanexar objeto para deixar quaisquer objetos que a ferramenta do robô tenha capturado.
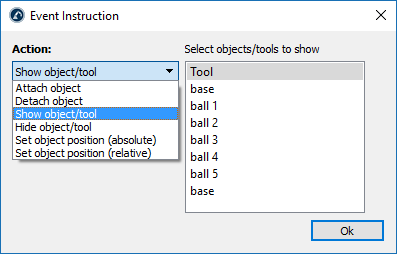
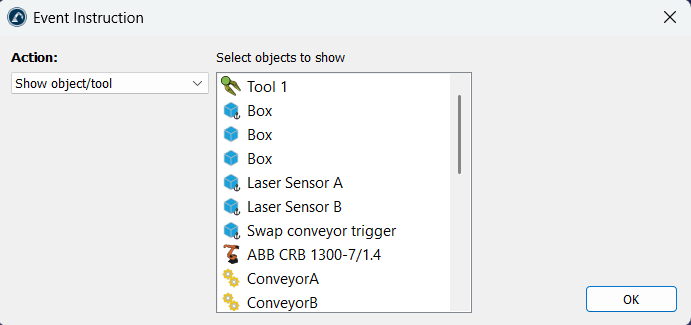
Mostrar objetos ou ferramentas
O evento de mostrar objetos ou ferramentas permite tornar um ou mais objetos, ferramentas ou robôs visíveis dentro do ambiente de simulação.
Você pode selecionar um ou mais itens mantendo pressionada a tecla Ctrl.
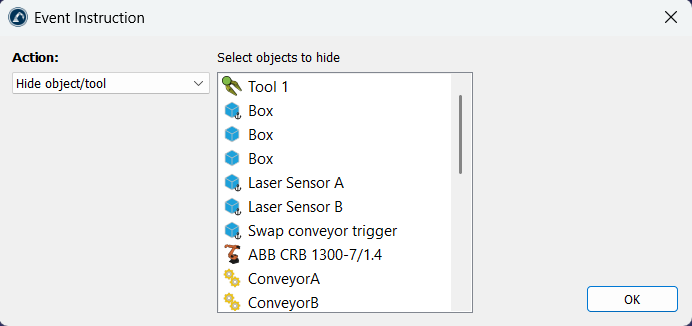
Ocultar objetos ou ferramentas
O evento de ocultar objetos ou ferramentas permite tornar um ou mais objetos ou ferramentas invisíveis dentro da simulação.
Você pode selecionar um ou mais itens mantendo pressionada a tecla Ctrl.
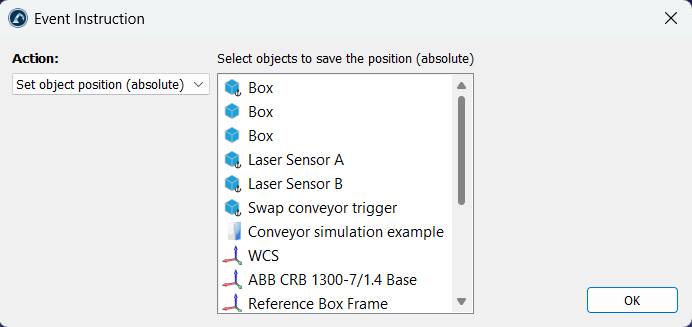
Definir a posição absoluta
A opção Definir posição do objeto (absoluta) permite atualizar a posição de cada objeto selecionado quando essa ação é acionada. A referência pai à qual cada item está anexado não é modificada. Somente a posição de cada objeto é atualizada.
Você pode selecionar um ou mais itens mantendo pressionada a tecla Ctrl. A posição atual do item é registrada quando você pressiona OK.
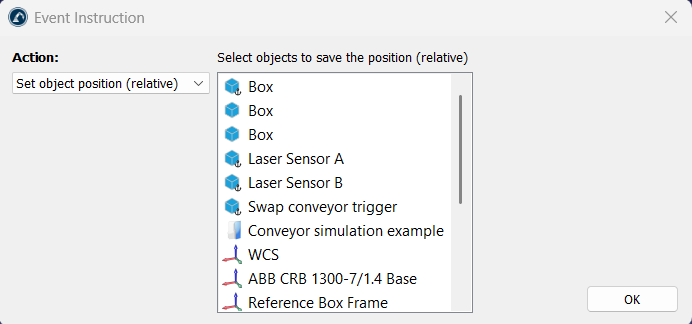
Definir a posição relativa
A opção Definir posição do objeto (relativa) permite atualizar a posição e o pai de cada objeto selecionado quando essa ação é acionada. A referência pai à qual cada item está anexado também é modificada, e a posição de cada objeto também é atualizada.
Você pode selecionar um ou mais itens mantendo pressionada a tecla Ctrl. A posição atual do item e do item pai ao qual ele está anexado é registrada quando você pressiona OK.
A diferença entre essa instrução e a instrução de posição absoluta é que essa instrução também atualiza o item pai ao qual cada objeto está anexado.
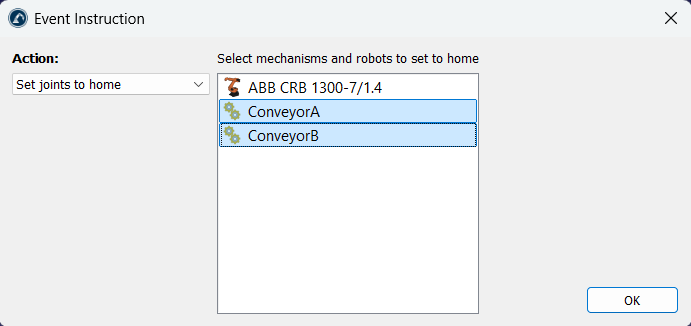
Definir o robô para a posição inicial
O evento de definir as juntas para a posição inicial (home) aciona o robô ou mecanismo selecionado para se mover imediatamente para suas posições de junta "home" definidas (o movimento não é simulado ao longo do tempo).
Isso é útil quando você precisa redefinir uma simulação e posicionar as esteiras na posição inicial.
Você pode selecionar um ou mais itens mantendo pressionada a tecla Ctrl.
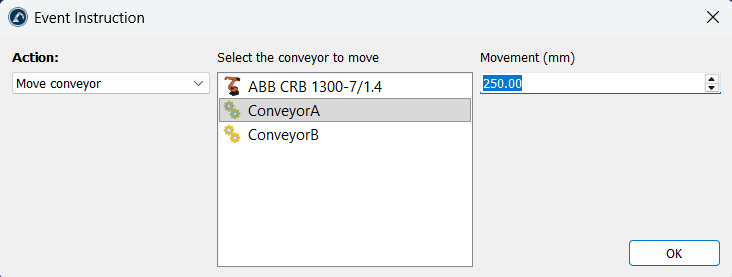
Evento de mover esteira
O evento de mover esteira simula o deslocamento da esteira por uma distância específica, simulando o efeito do movimento ao longo do tempo.
Isso é útil quando você precisa simular um incremento específico para processar um objeto na esteira depois que ela se move por uma distância específica.
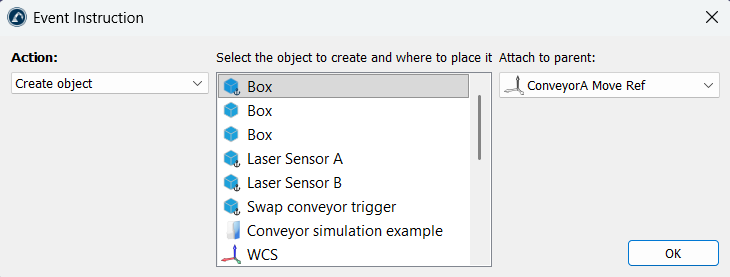
Criar objeto
A instrução Criar objeto permite simular um alimentador (feeder) criando um novo objeto no ambiente de simulação.
Você deve selecionar o objeto modelo a ser criado e a referência pai à qual os itens devem ser anexados.
Essa ação é útil para criar novos objetos em uma esteira.
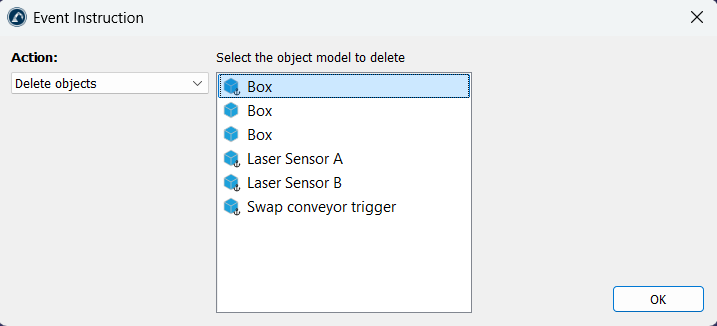
Excluir objetos
A instrução Excluir objetos remove objetos do ambiente de simulação.
Você deve selecionar um objeto modelo que deseja excluir. Qualquer objeto que corresponda ao nome e à geometria do mesmo objeto é excluído quando essa ação é acionada. O objeto modelo selecionado e quaisquer objetos bloqueados não são removidos.
Essa instrução ajuda a limpar uma simulação que foi concluída e na qual você tem muitos objetos que foram criados pela instrução Criar objeto.
Aguardar objeto
A instrução Aguardar objeto espera que um objeto entre em contato com outro objeto para acionar uma ação específica.
Esse evento é útil quando você deseja acionar uma ação com base no contato entre objetos. É comum colocar essa instrução sozinha em um programa em execução em loop, que executa uma ação específica quando um objeto entra em contato com um sensor.
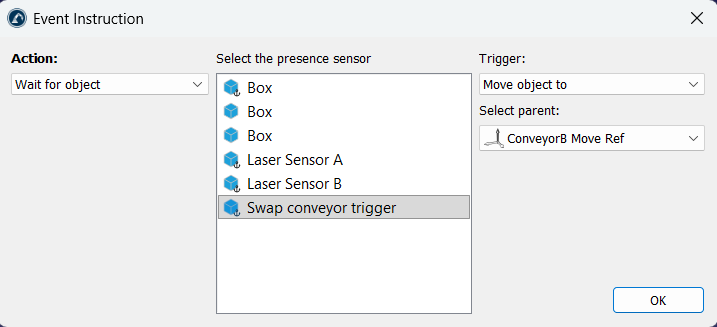
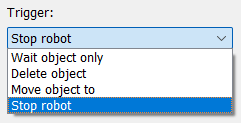
As ações que você pode executar quando um objeto entra em contato com o sensor são as seguintes:
1.Parar um robô: você deve selecionar o robô ou mecanismo que deve parar.
2.Excluir um objeto: o objeto deve ser removido da estação.
3.Aguardar apenas o objeto (por exemplo, você pode acionar um robô para pegar um objeto).
4.Mover um objeto para outro sistema de coordenadas. Por exemplo, para transferir um objeto de uma esteira para outra.