Crie uma estação RoboDK
Você deve seguir estas etapas para preparar o teste ballbar off-line:
1.Selecione o robô:
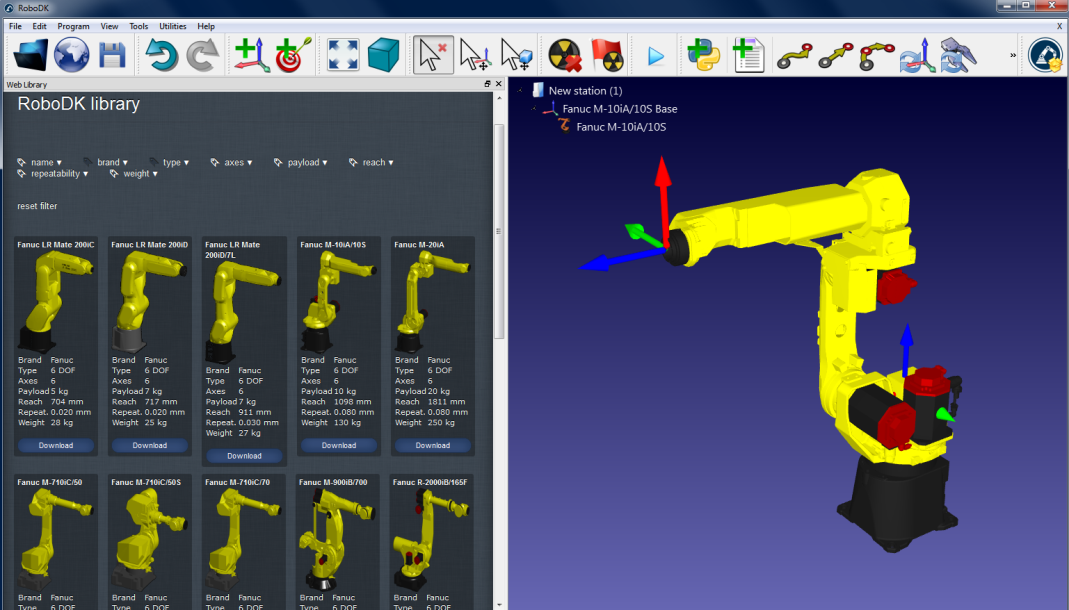
a.Selecione Arquivo ➔ Abrir biblioteca on-line. Deverá aparecer uma janela com uma lista de robôs.
b.(Opcional) Use filtros para refinar a seleção do robô.
c.Encontre seu robô e selecione Download.
Como alternativa, selecione Arquivo ➔ Abrir... e selecione um arquivo de robô no computador. Esse arquivo pode ser baixado do site: https://robodk.com/library ou obtido após um projeto de calibração do robô.
2.Add-in o módulo de teste ballbar na estação:
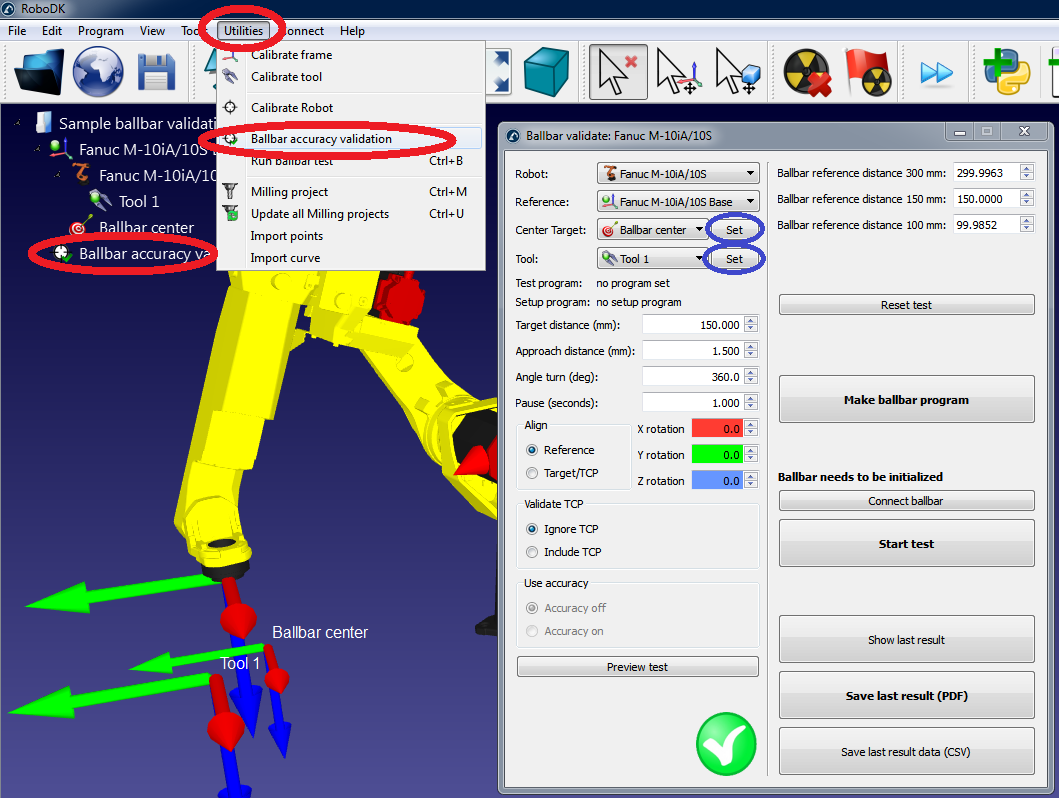
a.Selecione Utilitários ➔ Teste de precisão do Ballbar
b.A janela a seguir será exibida e um centro Ballbar de destino será criado automaticamente. Se o robô não tiver TCP, a ferramenta TCP 1 também será criada automaticamente.
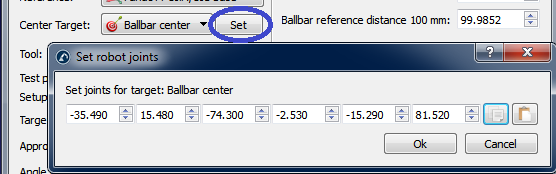
3.Insira os valores de eixo do robô no centro do teste da barra de esferas (centro da barra de esferas de destino):
a.Selecione Definir ao lado do centro do Ballbar desejado.
b.Digite os valores de eixo dos robôs (eixos 1 a 6).
c.Selecione OK.
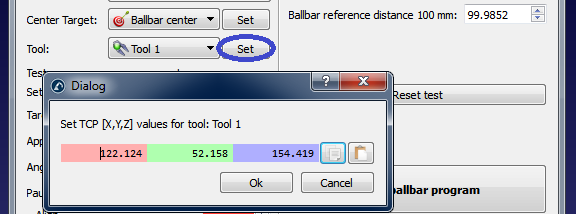
4.Digite as coordenadas do TCP:
a.Selecione Definir ao lado da ferramenta selecionada (Ferramenta 1, neste exemplo)
b.Insira as coordenadas X,Y,Z do TCP (em relação ao efetor final do robô)
c.Selecione OK
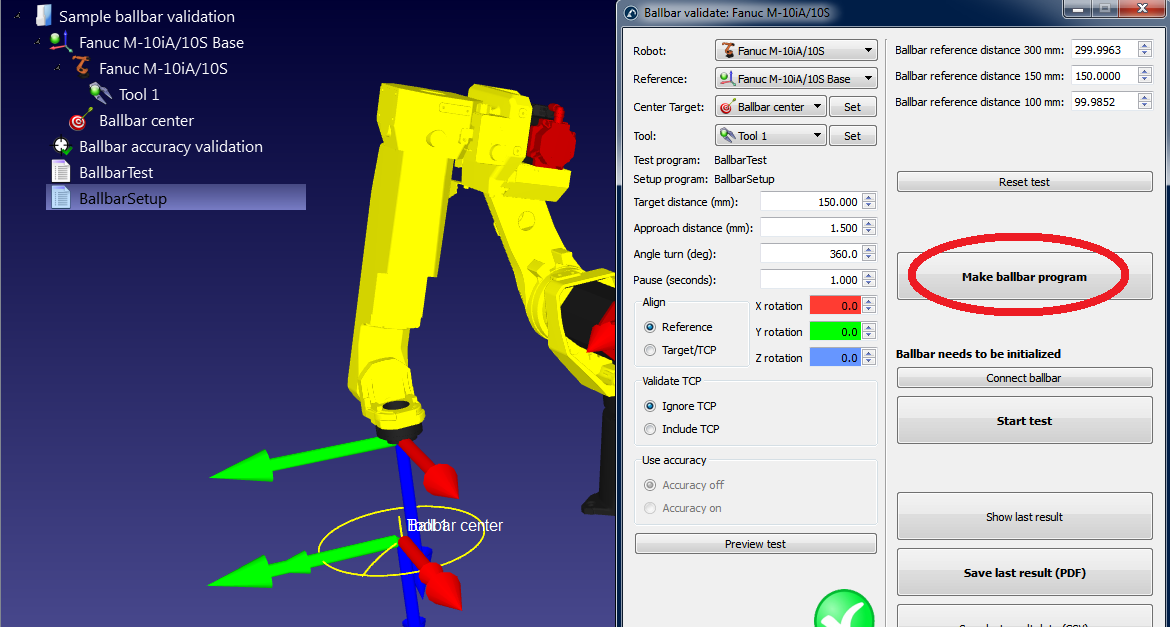
5.Gerar programas:
a.Selecione Criar programa ballbar e o programa será criado. Na verdade, serão exibidos dois programas:
i.BallbarSetup: Esse programa é usado para posicionar o ponto central do pivô do copo de ferramentas (centro do círculo) no mesmo local em que estava posicionado anteriormente
ii.BallbarTest: Este programa é usado para fazer o círculo em torno do ponto de articulação (centro do círculo) para aquisição de dados com o ballbar
b.Clique duas vezes nos programas recém-gerados. O RoboDK simulará o robô executando os programas.
Se o teste ballbar não for viável com as configurações padrão, você pode alterar os parâmetros do teste. Consulte a próxima seção para saber como alterar essas configurações.
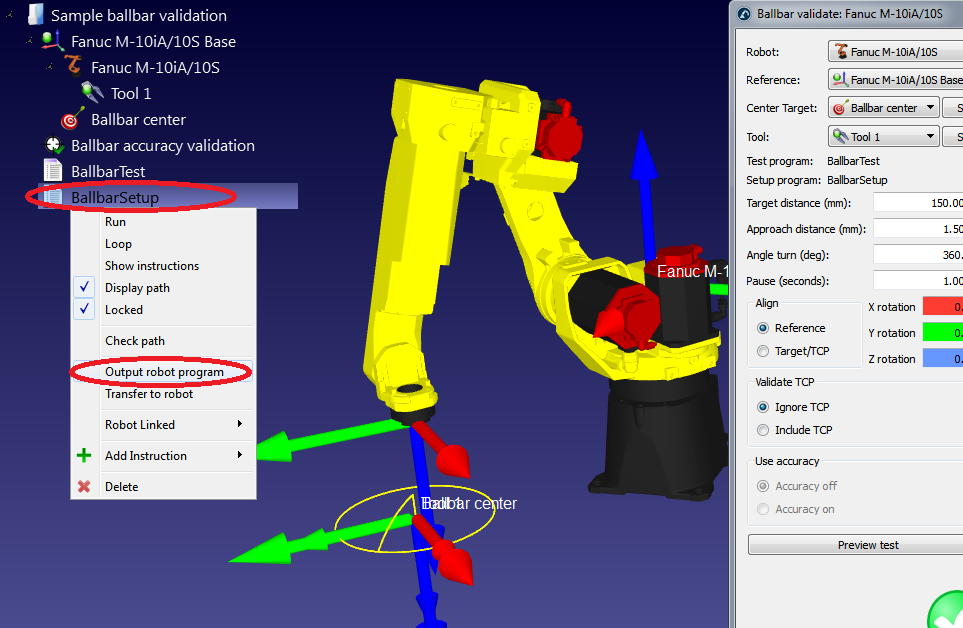
6.Quando o programa do robô estiver do seu agrado, os arquivos de programa para o robô poderão ser gerados:
a.Clique com o botão direito do mouse no programa BallbarTest.
b.Selecione Gerar programa do robô
c.Repita o procedimento para o programa BallbarSetup (todos os programas podem ser gerados automaticamente na área de trabalho pressionando F6).
d.Em seguida, os programas podem ser salvos em um disco USB e transferidos para o robô. A conexão FTP também pode ser usada com a maioria dos robôs.
7.Finalmente, selecione Arquivo ➔ Salvar Estação para salvar a estação do RoboDK em um único arquivo. O projeto pode ser retomado no RoboDK com um clique duplo no arquivo (formato rdk).