Edição dos parâmetros de teste do ballbar
A tela a seguir pode ser vista no menu de parâmetros de teste do ballbar. Ela pode ser acessada clicando-se duas vezes no item Validação da precisão do ballbar na estação (veja a etapa anterior).
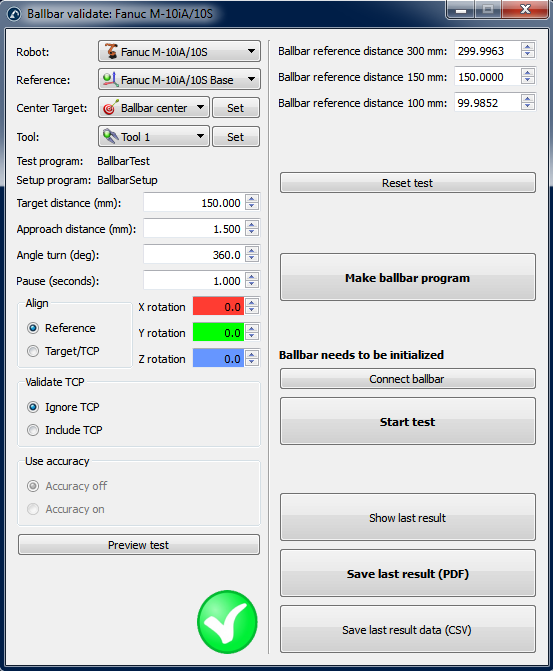
Pode ser que o teste de ballbar não seja viável por padrão. A viabilidade do teste depende de todos esses parâmetros, além das articulações do robô, da ferramenta central e da posição do TCP.
Se o teste não for viável em primeiro lugar, podemos selecionar "Visualizar teste" e provavelmente veremos uma sequência incompleta. Nesse caso, podemos diminuir o " Ângulo de giro (graus)" para que o programa seja viável. Se esse não for o caso, podemos reduzir o raio do círculo ("Target distance"). Com o Ballbar QC20-W da Renishaw, podemos testar distâncias de 100 mm, 150 mm e 300 mm com um erro de +/-1 mm. Com o RCS L-90 da Renishaw, o alcance do ballbar é de 240 mm a 330 mm. A "Distância de aproximação (mm)" e a pausa ("Pausa (segundos)") podem ser deixadas como padrão. Esses parâmetros permitem detectar o início e o fim do teste.
O plano de teste é orientado em relação à estrutura de referência da base do robô ("Referência" na seção "Alinhar"), o que significa que o plano XY da estrutura de referência do robô é usado para criar o círculo. Podemos optar por fazer o teste com relação ao quadro de referência da ferramenta. Nesse caso, o plano XY da ferramenta é usado (quando o centro foi ensinado). Podemos acrescentar rotações adicionais com relação aos eixos X, Y e/ou Z da estrutura de referência em ambos os casos.
Se alterarmos determinados parâmetros (como adicionar a ferramenta na validação), aparecerá a mensagem "Importante: o TCP deve ser preciso". Isso significa que os movimentos são calculados com relação ao centro da ferramenta. Caso contrário, podemos ter erros de TCP e o teste será viável de qualquer forma.
Se selecionarmos a opção "Incluir TCP", a orientação da ferramenta muda com o movimento ao longo do círculo. Essa opção permite avaliar o erro do robô mais a ferramenta como um único sistema. Caso contrário, estaremos verificando o erro apenas do robô ("Ignorar TCP").