Teste ballbar
Esta seção descreve as etapas necessárias para fazer as medições do ballbar.
Você deve ter 2 programas de robô:
●BallbarSetup: esse programa permite definir o centro do teste ballbar (centro do copo da ferramenta) no mesmo local em que registramos as articulações do robô.
●BallbarTest: esse programa é a trajetória circular em torno do centro do copo de ferramentas para fazer a aquisição de medidas com o ballbar.
Para garantir que a ferramenta central esteja na posição correta, devemos executar o programa BallbarSetup. O robô se moverá até o ponto central com uma interpolação linear. Em seguida, devemos posicionar e travar o suporte magnético.
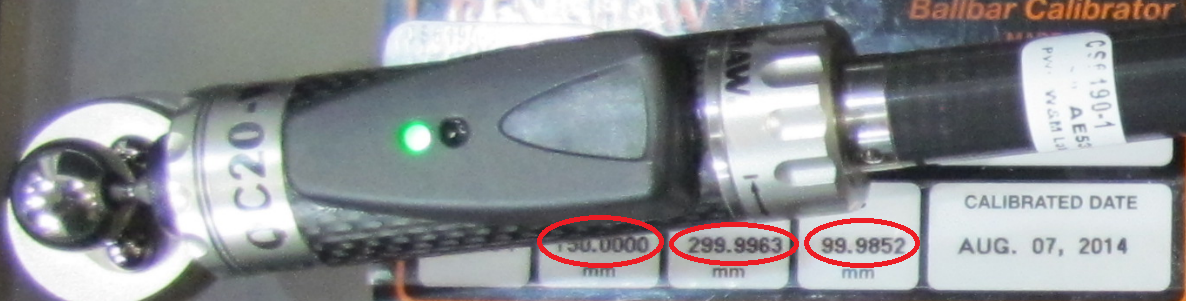
Devemos nos certificar de que inserimos corretamente os parâmetros de masterização do kit ballbar (veja a imagem a seguir). Esses valores devem ser inseridos em " Distância de referência do ballbar ..." no menu de parâmetros de teste. O ballbar QC20-W será capaz de medir essas distâncias mais ou menos 1 mm com precisão de um micrômetro. A precisão é suficiente para robôs industriais, mas a faixa de medição pode ser limitada em certos casos. Para o RCS L-90, você pode copiar a distância-alvo (raio), pois a distância de referência é irrelevante.
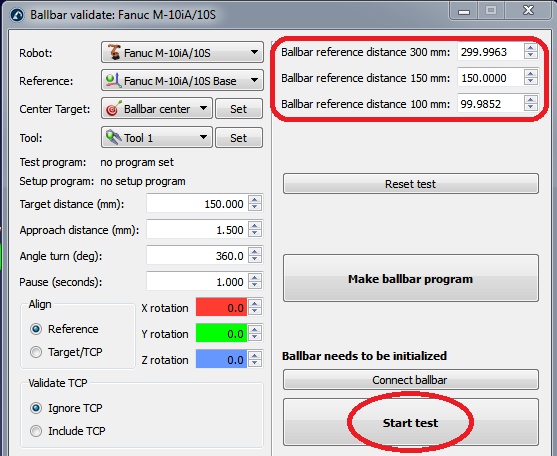
Podemos começar o teste selecionando "Iniciar Teste" (não é necessário selecionar previamente "Conectar ballbar"). Uma nova janela aparecerá mostrando o status da conexão do ballbar. Se o ballbar não tiver sido detectado ou se houver algum problema, você deverá fechar a janela de conexão do ballbar, desligar o dispositivo ballbar, ligá-lo novamente e tentar iniciar o teste novamente. Se o problema persistir, verifique se você tem uma conexão adequada (Bluetooth ou USB). O RCS L-90 oferece funcionalidade adicional e indicará se o dispositivo precisa de localização ou calibração.
Depois que a conexão for estabelecida com o ballbar, o RoboDK orientará o usuário a seguir estas etapas:
1.Inicialize o ballbar com a distância selecionada para o teste.
2.Mova o robô para a posição inicial (o programa fará uma pausa antes de continuar)
3.O usuário deve então colocar a ballbar no robô.
4.Inicie o teste selecionando OK na tela do computador. O robô não se moverá até que selecionemos continuar no pendente de ensino do robô.
5.Se tudo estiver correto, uma nova janela aparecerá mostrando a medição da corrente da ballbar.
6.Podemos continuar com o programa do robô para percorrer o caminho.
7.Quando o robô termina o movimento, podemos interromper as medições (no sentido horário e anti-horário).
Quando o teste for concluído, o RoboDK mostrará o resultado do teste e solicitará que o usuário salve um relatório em formato PDF.
A etapa 4 é importante para detectar o início e o fim do teste. Esses limites são detectados porque o robô faz um movimento radial de cerca de 1,5 mm para acionar o início e o fim das medições (nos pontos inicial e final do caminho).