Robot ballbar testing
Introdução
O teste ballbar é frequentemente usado para testar o desempenho de máquinas de controle numérico computadorizado (CNC). Esse teste também pode ser realizado em robôs para verificar seu desempenho e degradação. Esse teste mostra o erro, a repetibilidade e a folga de uma trajetória circular.
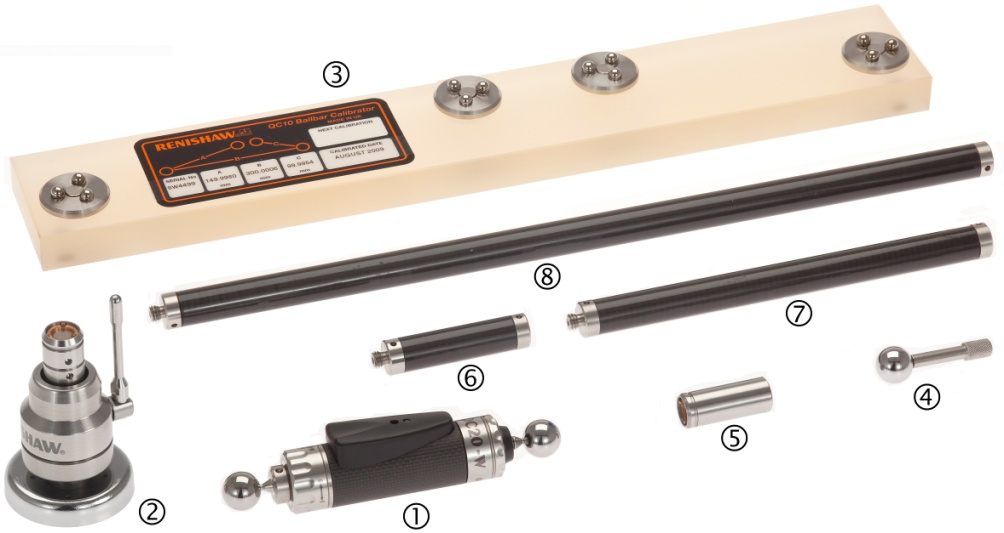
O dispositivo ballbar mais comum para fins de desempenho é o Renishaw QC20-W. Esse ballbar funciona sem fio com uma bateria CR2 (3V) e requer um computador com conexão Bluetooth.

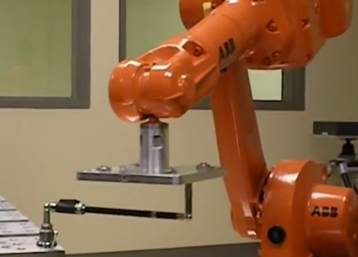
A imagem a seguir mostra o teste ballbar realizado com um robô de tamanho médio.
O software RoboDK orienta você em cada etapa para realizar um teste ballbar com sucesso. O RoboDK pode preparar o programa do robô no ambiente de simulação 3D, registrar as medições do ballbar e gerar um relatório de desempenho específico para o seu robô.
Requisitos de teste
É necessário ter um computador com as seguintes características para realizar adequadamente um teste ballbar (gerar o programa do robô, concluir a aquisição de dados e gerar um relatório em PDF).
Renishaw QC20-W
1.Laptop com Bluetooth. A conexão Bluetooth deve ser gerenciada pela "pilha Microsoft Bluetooth" (padrão). Os dispositivos Bluetooth incluídos nos laptops geralmente são muito limitados. É altamente recomendável instalar um módulo Bluetooth externo com os drivers do fabricante.
2.É necessário que as portas USB do computador estejam desbloqueadas E sem criptografia. Isso permite que o programa seja transferido para o robô sem problemas. Como alternativa, é possível estabelecer uma conexão FTP.
3.O kit Ballbar QC20-W da Renishaw.
4.O software RoboDK deve ser instalado e uma licença apropriada é necessária. Para licenças de rede, é necessária uma conexão com a Internet para verificar a licença. Para instalar ou atualizar o RoboDK para um teste ballbar, siga estas etapas:
a.Faça o download do RoboDK na seção de downloads https://robodk.com/download.
b.Entre em contato conosco para obter o driver ballbar e descompacte o conteúdo na pasta
C:/RoboDK/api/ballbar/.
Renishaw RCS L-90
1.Laptop com Windows instalado.
2.É necessário que as portas USB (2) do computador estejam desbloqueadas E sem criptografia. Isso permite que o programa seja transferido para o robô sem problemas. Como alternativa, é possível estabelecer uma conexão FTP.
3.O kit ballbar RCS L-90 da Renishaw, devidamente montado no robô.
4.O software RoboDK deve ser instalado e uma licença apropriada é necessária. Para licenças de rede, é necessária uma conexão com a Internet para verificar a licença. Para instalar ou atualizar o RoboDK para um teste de ballbar, siga estas etapas:
a.Faça o download do RoboDK na seção de downloads https://robodk.com/download.
b.Entre em contato conosco para obter o driver ballbar e descompacte o conteúdo na pasta
C:/RoboDK/api/ballbar/.
Preparação off-line
Um programa de robô deve ser preparado para concluir o teste ballbar. O programa do robô é uma trajetória circular em torno de um ponto central. Esta seção explica como preparar o programa. Antes de continuar, é recomendável que você assista ao seguinte vídeo introdutório: https://robodk.com/ballbar-test.
O que é necessário para a célula robótica:
1.As articulações do robô ao definir o suporte do pivô (centro do círculo).
2.Os valores [X, Y, Z] do TCP da ferramenta (posição da ferramenta em relação ao flange do robô). Esses valores são muito importantes se quisermos fazer uma ferramenta de validação junto com a validação do robô. Caso contrário, essas informações não são importantes (uma estimativa é suficiente) porque a precisão do TCP não será exigida nem validada com o teste ballbar.
Crie uma estação RoboDK
Você deve seguir estas etapas para preparar o teste ballbar off-line:
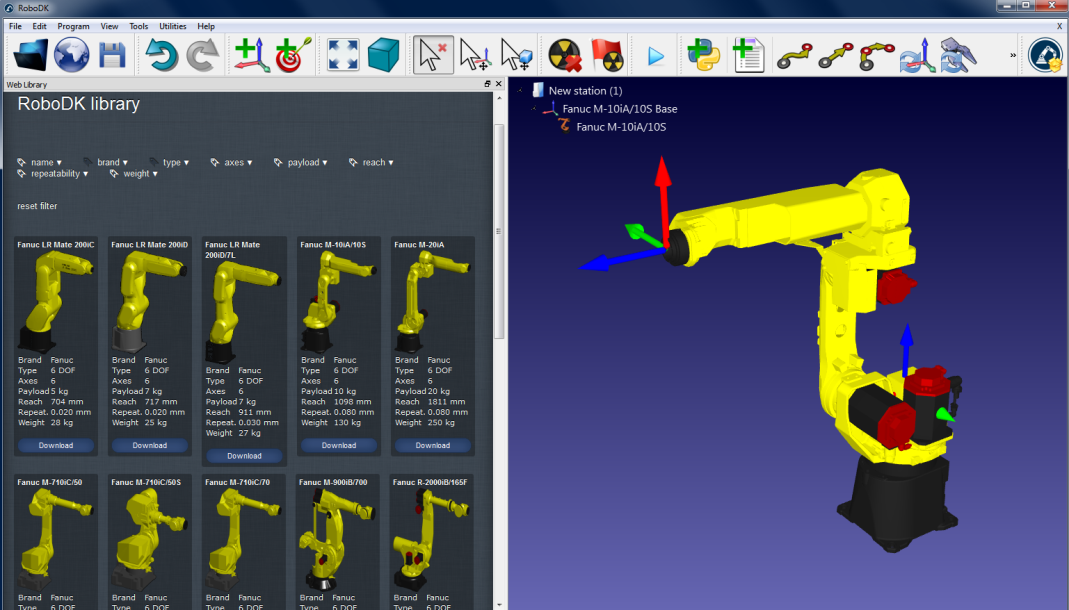
1.Selecione o robô:
a.Selecione Arquivo ➔ Abrir biblioteca on-line. Deverá aparecer uma janela com uma lista de robôs.
b.(Opcional) Use filtros para refinar a seleção do robô.
c.Encontre seu robô e selecione Download.
Como alternativa, selecione Arquivo ➔ Abrir... e selecione um arquivo de robô no computador. Esse arquivo pode ser baixado do site: https://robodk.com/library ou obtido após um projeto de calibração do robô.
2.Add-in o módulo de teste ballbar na estação:
a.Selecione Utilitários ➔ Teste de precisão do Ballbar
b.A janela a seguir será exibida e um centro Ballbar de destino será criado automaticamente. Se o robô não tiver TCP, a ferramenta TCP 1 também será criada automaticamente.
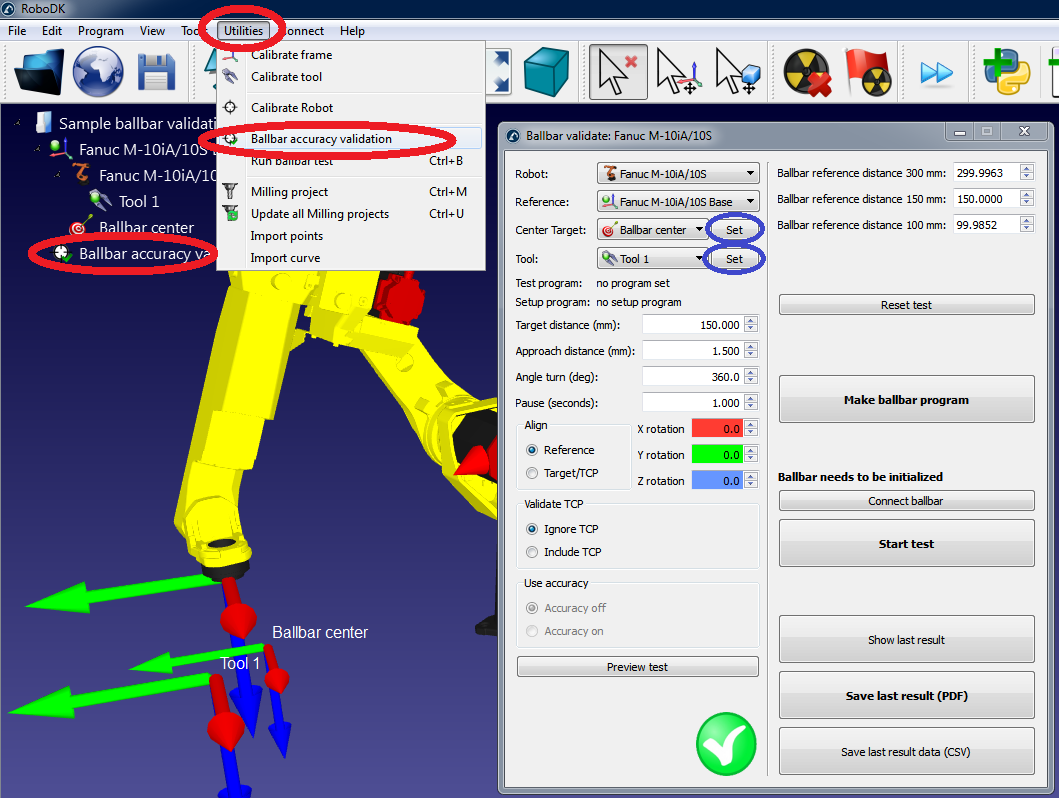
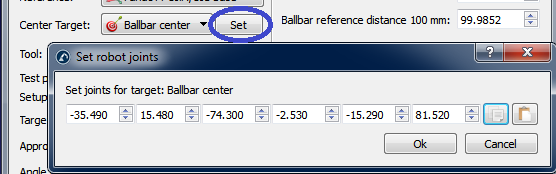
3.Insira os valores de eixo do robô no centro do teste da barra de esferas (centro da barra de esferas de destino):
a.Selecione Definir ao lado do centro do Ballbar desejado.
b.Digite os valores de eixo dos robôs (eixos 1 a 6).
c.Selecione OK.
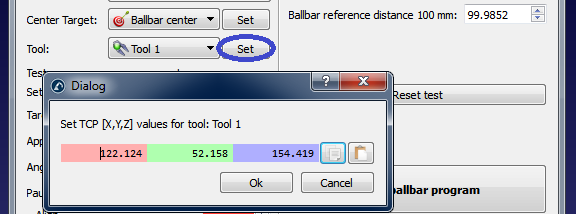
4.Digite as coordenadas do TCP:
a.Selecione Definir ao lado da ferramenta selecionada (Ferramenta 1, neste exemplo)
b.Insira as coordenadas X,Y,Z do TCP (em relação ao efetor final do robô)
c.Selecione OK
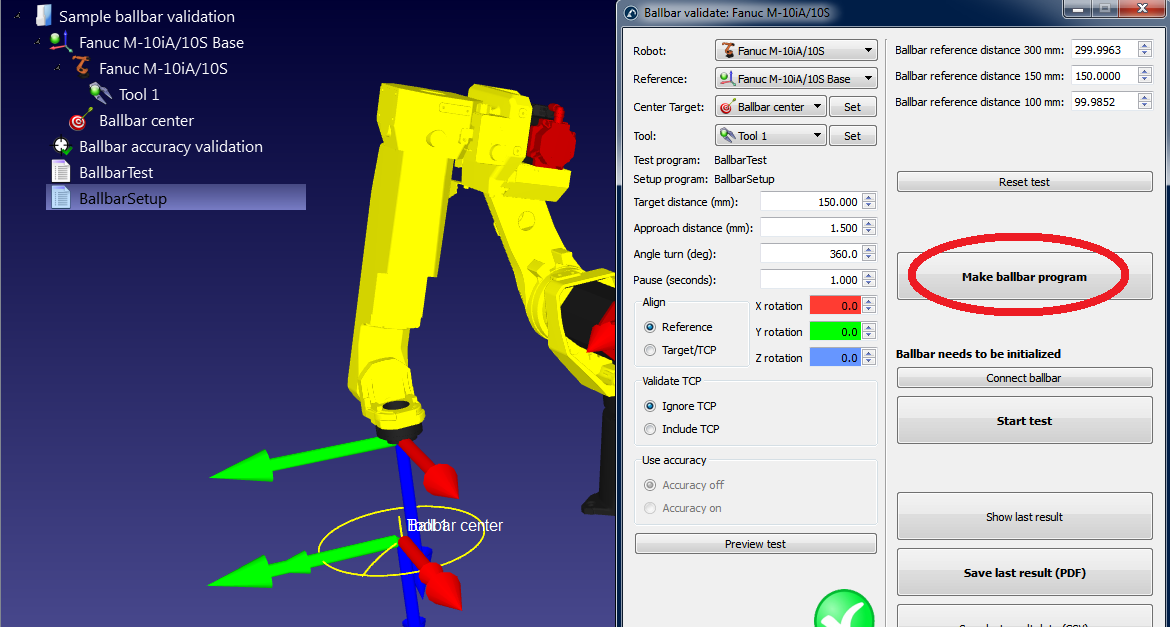
5.Gerar programas:
a.Selecione Criar programa ballbar e o programa será criado. Na verdade, serão exibidos dois programas:
i.BallbarSetup: Esse programa é usado para posicionar o ponto central do pivô do copo de ferramentas (centro do círculo) no mesmo local em que estava posicionado anteriormente
ii.BallbarTest: Este programa é usado para fazer o círculo em torno do ponto de articulação (centro do círculo) para aquisição de dados com o ballbar
b.Clique duas vezes nos programas recém-gerados. O RoboDK simulará o robô executando os programas.
Se o teste ballbar não for viável com as configurações padrão, você pode alterar os parâmetros do teste. Consulte a próxima seção para saber como alterar essas configurações.
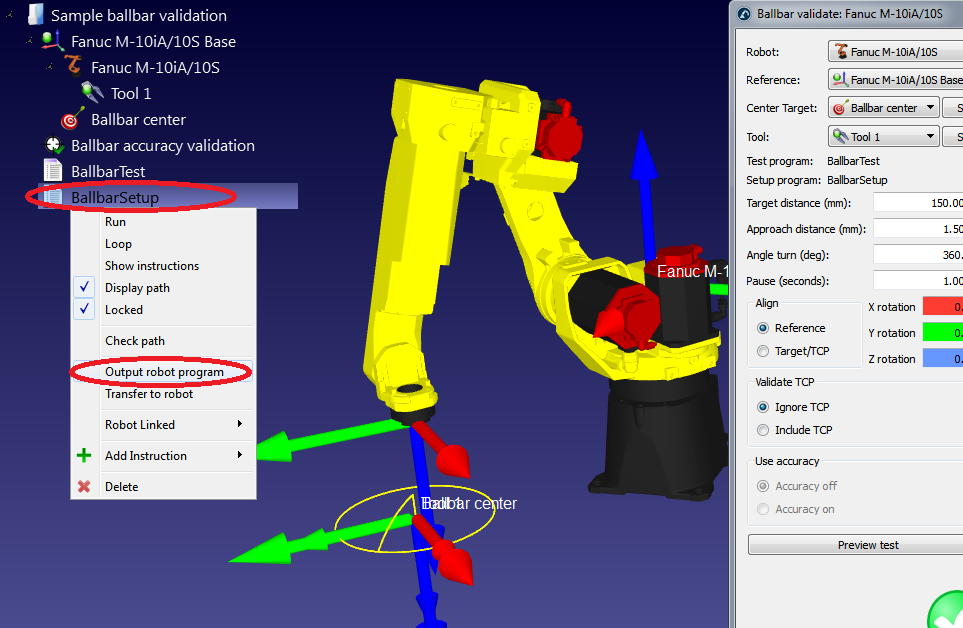
6.Quando o programa do robô estiver do seu agrado, os arquivos de programa para o robô poderão ser gerados:
a.Clique com o botão direito do mouse no programa BallbarTest.
b.Selecione Gerar programa do robô
c.Repita o procedimento para o programa BallbarSetup (todos os programas podem ser gerados automaticamente na área de trabalho pressionando F6).
d.Em seguida, os programas podem ser salvos em um disco USB e transferidos para o robô. A conexão FTP também pode ser usada com a maioria dos robôs.
7.Finalmente, selecione Arquivo ➔ Salvar Estação para salvar a estação do RoboDK em um único arquivo. O projeto pode ser retomado no RoboDK com um clique duplo no arquivo (formato rdk).
Edição dos parâmetros de teste do ballbar
A tela a seguir pode ser vista no menu de parâmetros de teste do ballbar. Ela pode ser acessada clicando-se duas vezes no item Validação da precisão do ballbar na estação (veja a etapa anterior).
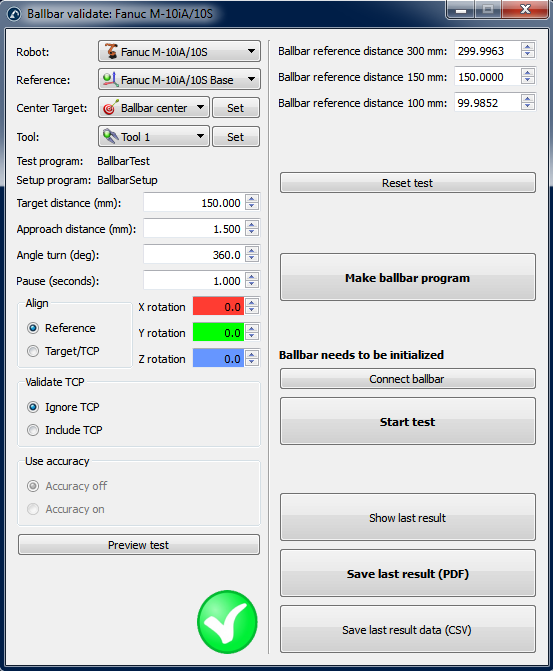
Pode ser que o teste de ballbar não seja viável por padrão. A viabilidade do teste depende de todos esses parâmetros, além das articulações do robô, da ferramenta central e da posição do TCP.
Se o teste não for viável em primeiro lugar, podemos selecionar "Visualizar teste" e provavelmente veremos uma sequência incompleta. Nesse caso, podemos diminuir o " Ângulo de giro (graus)" para que o programa seja viável. Se esse não for o caso, podemos reduzir o raio do círculo ("Target distance"). Com o Ballbar QC20-W da Renishaw, podemos testar distâncias de 100 mm, 150 mm e 300 mm com um erro de +/-1 mm. Com o RCS L-90 da Renishaw, o alcance do ballbar é de 240 mm a 330 mm. A "Distância de aproximação (mm)" e a pausa ("Pausa (segundos)") podem ser deixadas como padrão. Esses parâmetros permitem detectar o início e o fim do teste.
O plano de teste é orientado em relação à estrutura de referência da base do robô ("Referência" na seção "Alinhar"), o que significa que o plano XY da estrutura de referência do robô é usado para criar o círculo. Podemos optar por fazer o teste com relação ao quadro de referência da ferramenta. Nesse caso, o plano XY da ferramenta é usado (quando o centro foi ensinado). Podemos acrescentar rotações adicionais com relação aos eixos X, Y e/ou Z da estrutura de referência em ambos os casos.
Se alterarmos determinados parâmetros (como adicionar a ferramenta na validação), aparecerá a mensagem "Importante: o TCP deve ser preciso". Isso significa que os movimentos são calculados com relação ao centro da ferramenta. Caso contrário, podemos ter erros de TCP e o teste será viável de qualquer forma.
Se selecionarmos a opção "Incluir TCP", a orientação da ferramenta muda com o movimento ao longo do círculo. Essa opção permite avaliar o erro do robô mais a ferramenta como um único sistema. Caso contrário, estaremos verificando o erro apenas do robô ("Ignorar TCP").
Teste ballbar
Esta seção descreve as etapas necessárias para fazer as medições do ballbar.
Você deve ter 2 programas de robô:
●BallbarSetup: esse programa permite definir o centro do teste ballbar (centro do copo da ferramenta) no mesmo local em que registramos as articulações do robô.
●BallbarTest: esse programa é a trajetória circular em torno do centro do copo de ferramentas para fazer a aquisição de medidas com o ballbar.
Para garantir que a ferramenta central esteja na posição correta, devemos executar o programa BallbarSetup. O robô se moverá até o ponto central com uma interpolação linear. Em seguida, devemos posicionar e travar o suporte magnético.
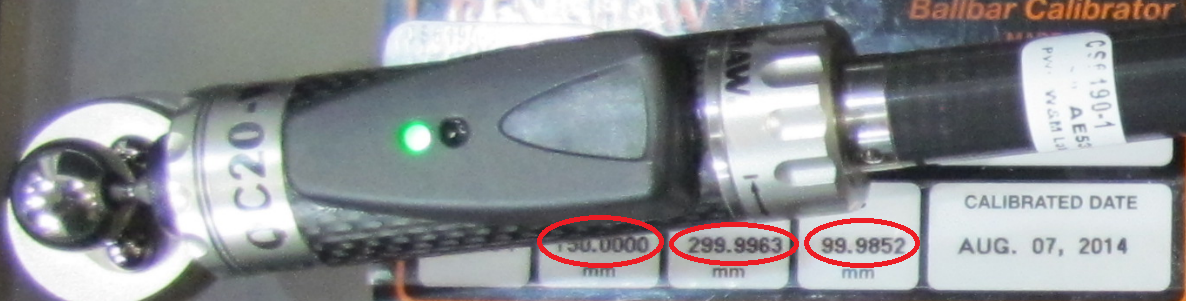
Devemos nos certificar de que inserimos corretamente os parâmetros de masterização do kit ballbar (veja a imagem a seguir). Esses valores devem ser inseridos em " Distância de referência do ballbar ..." no menu de parâmetros de teste. O ballbar QC20-W será capaz de medir essas distâncias mais ou menos 1 mm com precisão de um micrômetro. A precisão é suficiente para robôs industriais, mas a faixa de medição pode ser limitada em certos casos. Para o RCS L-90, você pode copiar a distância-alvo (raio), pois a distância de referência é irrelevante.
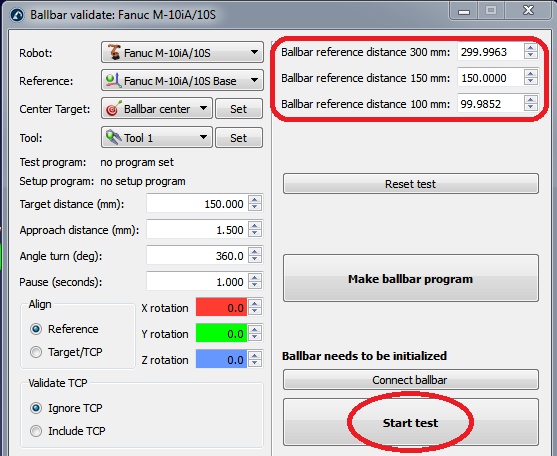
Podemos começar o teste selecionando "Iniciar Teste" (não é necessário selecionar previamente "Conectar ballbar"). Uma nova janela aparecerá mostrando o status da conexão do ballbar. Se o ballbar não tiver sido detectado ou se houver algum problema, você deverá fechar a janela de conexão do ballbar, desligar o dispositivo ballbar, ligá-lo novamente e tentar iniciar o teste novamente. Se o problema persistir, verifique se você tem uma conexão adequada (Bluetooth ou USB). O RCS L-90 oferece funcionalidade adicional e indicará se o dispositivo precisa de localização ou calibração.
Depois que a conexão for estabelecida com o ballbar, o RoboDK orientará o usuário a seguir estas etapas:
1.Inicialize o ballbar com a distância selecionada para o teste.
2.Mova o robô para a posição inicial (o programa fará uma pausa antes de continuar)
3.O usuário deve então colocar a ballbar no robô.
4.Inicie o teste selecionando OK na tela do computador. O robô não se moverá até que selecionemos continuar no pendente de ensino do robô.
5.Se tudo estiver correto, uma nova janela aparecerá mostrando a medição da corrente da ballbar.
6.Podemos continuar com o programa do robô para percorrer o caminho.
7.Quando o robô termina o movimento, podemos interromper as medições (no sentido horário e anti-horário).
Quando o teste for concluído, o RoboDK mostrará o resultado do teste e solicitará que o usuário salve um relatório em formato PDF.
A etapa 4 é importante para detectar o início e o fim do teste. Esses limites são detectados porque o robô faz um movimento radial de cerca de 1,5 mm para acionar o início e o fim das medições (nos pontos inicial e final do caminho).
Relatório de teste do Ballbar
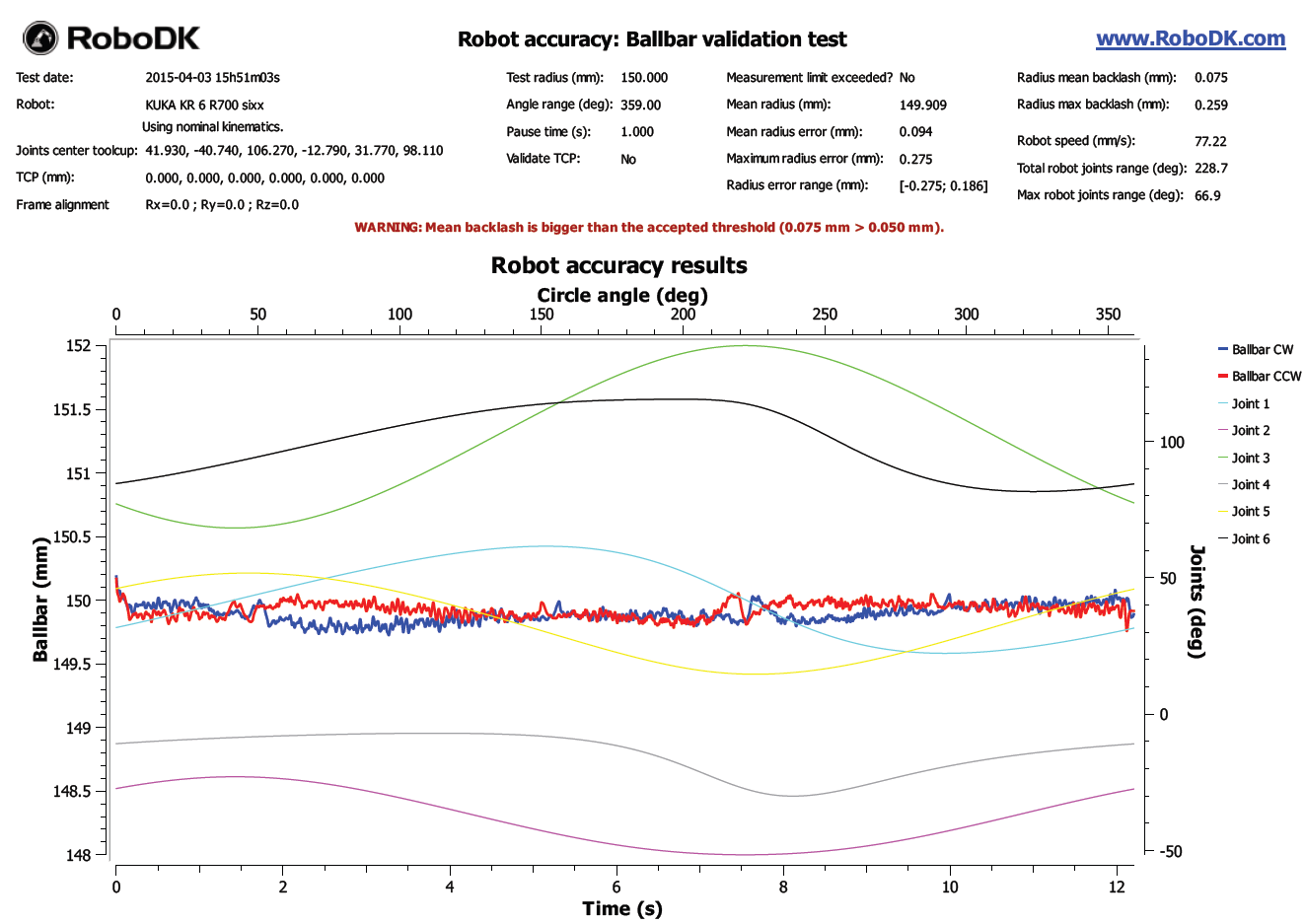
Quando o teste ballbar é concluído, é obtido um relatório em PDF (conforme mostrado na imagem a seguir):
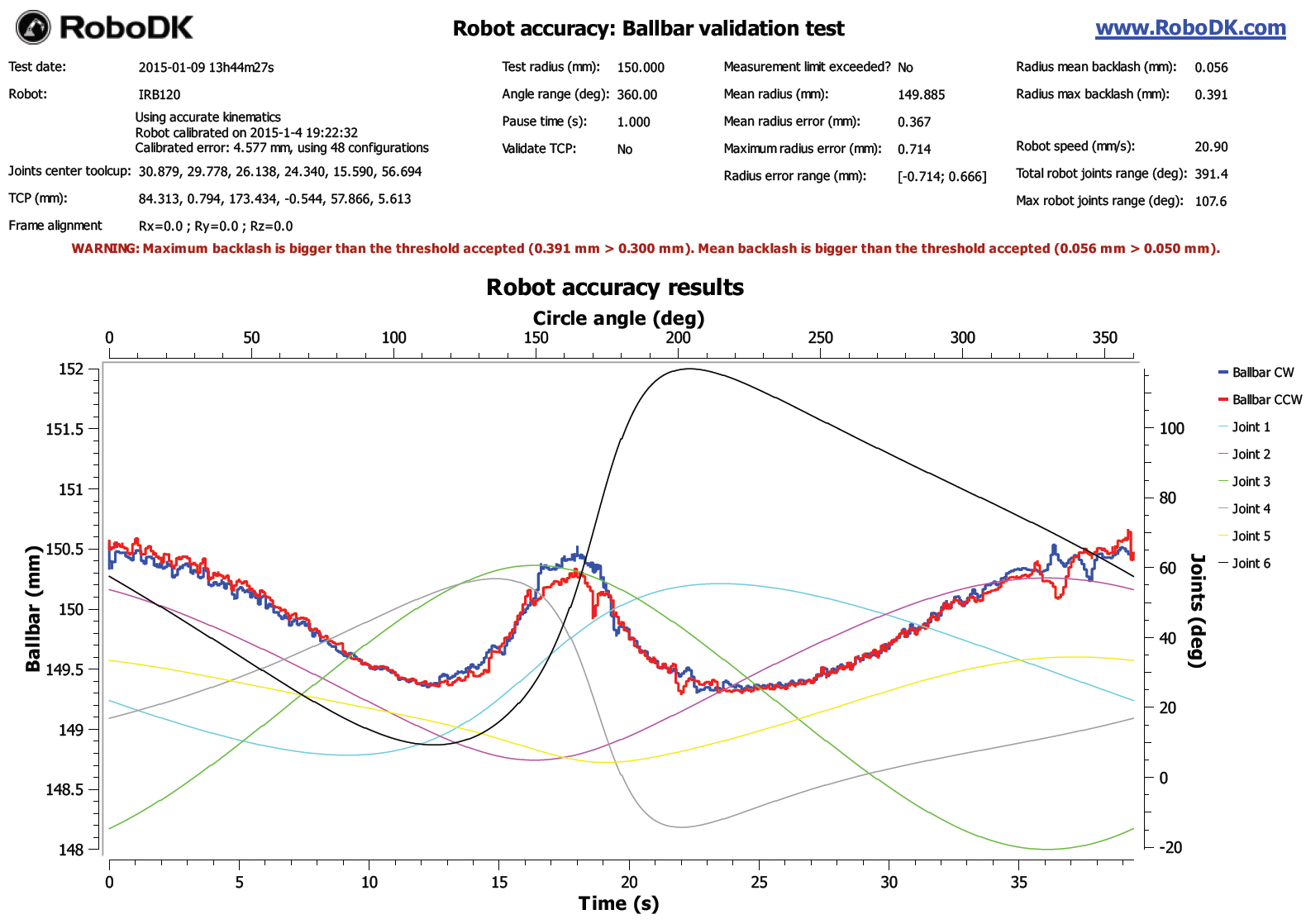
O relatório mostra as leituras do ballbar em mm (eixo Y à esquerda) para os movimentos no sentido horário e anti-horário (linhas azul e vermelha, respectivamente) em relação ao tempo em segundos (eixo X inferior). As articulações do robô também são exibidas. As articulações do robô são exibidas em graus (eixo Y à direita) em relação ao ângulo do círculo (360 graus significam uma volta completa). Um motor com defeito mostraria mudanças consideráveis na medição quando o movimento da articulação correspondente mudasse de direção, resultando em uma folga considerável.
O relatório avisará o usuário se a folga for maior do que um determinado limite. O limite pode ser definido no menu Ferramentas ➔ Opções ➔ guia Precisão.
Anexo - Conexão Bluetooth #BallbarBluetooth
Esta seção explica como estabelecer uma conexão Bluetooth entre o computador e a ballbar. Para que a comunicação funcione, é preciso primeiro estabelecer a comunicação entre o computador e o dispositivo ballbar usando o Windows.
O "Windows Bluetooth Stack" deve ser ativado (gerenciador de Bluetooth padrão no Windows). Em seguida, você deve seguir estas etapas para estabelecer uma primeira conexão:
1.Selecione o botão Iniciar do Windows
2.Selecione Painel de Controle
3.Procure a palavra-chave Bluetooth
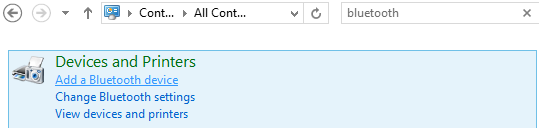
4.Selecionar dispositivos Bluetooth
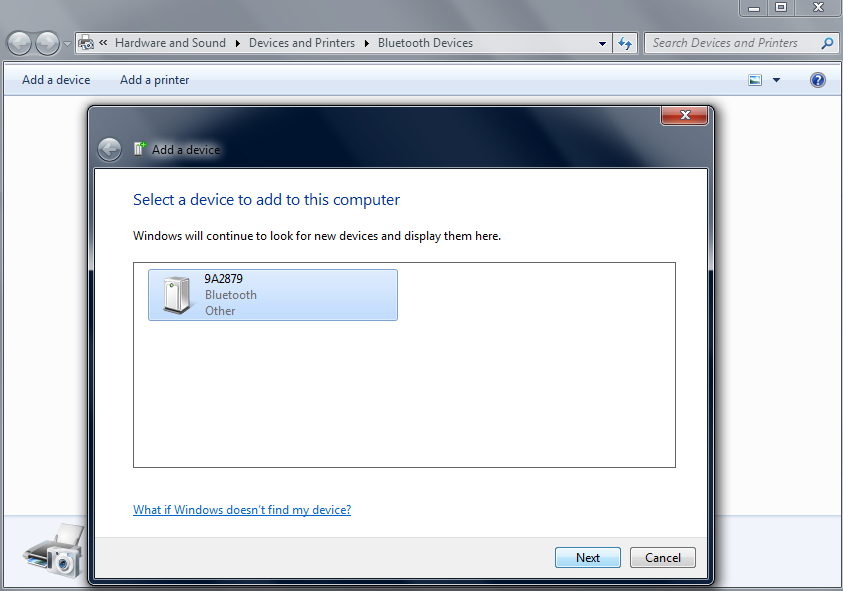
5.Selecione Adicionar um dispositivo se você não vir o dispositivo ballbar.
6.Quando o dispositivo for exibido, você deverá selecioná-lo e escolher Próximo. O número que você vê é o número de série do ballbar, impresso no dispositivo.
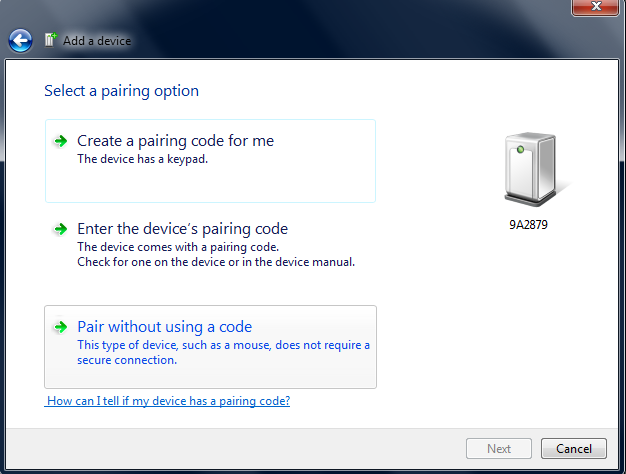
7.Por fim, você deve selecionar Parear sem usar um código.
O dispositivo Bluetooth agora está pronto para fazer medições por meio do RoboDK.
A conexão Bluetooth pode ser muito limitada se usarmos o dongle Bluetooth integrado em alguns laptops (mesmo em computadores recentes). Recomenda-se, então, comprar um dongle Bluetooth externo para que a conexão funcione sem problemas.
O computador não deve estar muito longe do dispositivo ballbar. Se houver problemas com a conexão, é recomendável usar um cabo de extensão USB para o dongle Bluetooth.