Configuração off-line
Recomenda-se que você construa um ambiente virtual da configuração real no RoboDK (configuração off-line) para preparar a trajetória e as posições para o teste. Isso pode ser feito antes de ter o robô e o tracker, usando apenas um computador com o RoboDK instalado. Os exemplos de configuração de calibração e validação de trajetória do RoboDK podem ser baixados da pasta:
https://robodk.com/stations#filter?feature=calibration-project.
O RoboDK tem um utilitário para gerar as configurações e a trajetória recomendada, conforme estabelecido pelo padrão ISO9283. Para usar esse utilitário:
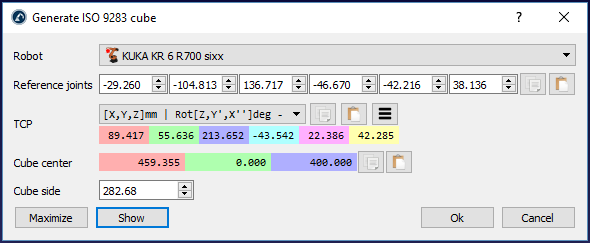
1.Utilitários➔ Criar cubo ISO 9283 (pontos e trajetória)
2.Digite as posições de eixo de referência (posição do robô em que a ferramenta está voltada para o tracker)
3.Ajuste a posição e o tamanho do cubo
4.Selecione OK
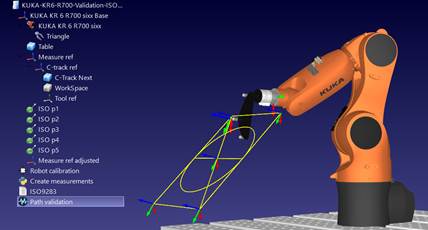
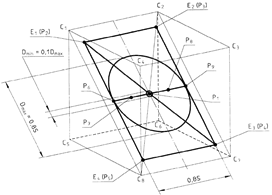
Isso criará os 5 pontos descritos pela norma ISO, bem como a trajetória recomendado para o teste de precisão da trajetória. Esses pontos e a trajetória permanecem dentro de um cubo localizado na frente do robô. Podemos definir o lado desejado do cubo, bem como mover o centro (ponto "ISO p1") e as juntas de referência que definirão a orientação da trajetória. Também é possível maximizar o tamanho do cubo para encontrar o maior cubo que caiba no espaço de trabalho do robô.
Uma estação de amostra com opções de calibração e validação do robô é mostrada na figura a seguir.