Introdução
A norma ISO "ISO9283: Manipulating industrial robots - Performance criteria and related test methods" (Manipulação de robôs industriais - Critérios de desempenho e métodos de teste relacionados) descreve testes para avaliar o desempenho de robôs industriais. Entre outras coisas, ela fornece procedimentos para medir adequadamente a precisão da posição do robô, a repetibilidade e a precisão da trajetória.
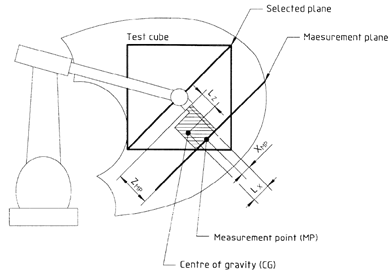
De acordo com a norma ISO9283, todos os testes devem ser realizados dentro do chamado cubo de teste ISO. O cubo de teste ISO deve ser o maior cubo que pode caber dentro do espaço de trabalho do robô. Além disso, a precisão e a repetibilidade da posição devem ser medidas 30 vezes em cinco configurações diferentes. É sabido que cinco configurações não são suficientes para fornecer uma medição adequada da precisão dos robôs modernos.
A maioria dos fabricantes de robôs só fornece a precisão posicional do robô se ele tiver sido calibrado; além disso, eles usam pelo menos 100 configurações diferentes para fornecer estatísticas adequadas de precisão de posição. Os robôs industriais são altamente repetíveis, mas não precisos; portanto, a precisão de um robô industrial pode ser aprimorada por meio da calibração.
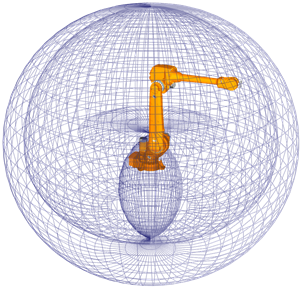
Espaço de trabalho típico de um robô nos anos 80 Espaço de trabalho típico de um robô moderno
No entanto, a norma ISO9283 é frequentemente usada para testes de repetibilidade e precisão de trajetória, mesmo que o robô não tenha sido calibrado.

Recomenda-se que você assista ao vídeo a seguir, que mostra os testes de precisão da trajetória com o RoboDK: https://youtu.be/yMQjqAQY1iE.
O RoboDK também pode ser usado para calibrar os robôs, bem como para testar seu desempenho antes e depois da calibração. Finalmente, o RoboDK também pode ser usado para testar a precisão do robô antes e depois da calibração por meio de testes de ballbar.