Precisão da trajetória
Para realizar testes de precisão de trajetória, é necessário ter um programa de robô criado com o RoboDK, como o programa ISO9283 criado pelo utilitário Create ISO cube. Podemos gerar o programa de robô específico do fornecedor selecionando o programa e pressionando F6 (ou selecionando Programa ➔ Gerar programa). Como alternativa, é possível usar qualquer outro programa criado no RoboDK (como uma linha reta, um círculo ou um quadrado).
Também é necessário ter um sistema de medição que possa rastrear a posição do efetor final e fornecer as medições de posição em relação a uma estrutura de referência. É necessário usar os procedimentos de configuração da base e da ferramenta no RoboDK (necessários para realizar a calibração ou os testes de precisão da posição) para identificar a estrutura da base do robô e a estrutura da ferramenta.
Os dados de medição devem ser adquiridos durante a movimentação do robô ao longo do programa. As medições devem ser registradas continuamente, usando o software padrão fornecido pelo fabricante do sistema de medição. É necessário exportar as medições como um arquivo CSV ou TXT. Esses arquivos devem conter dados de posição XYZ, bem como o registro de data e hora de cada medição. Opcionalmente, essas medições podem conter a orientação da ferramenta em relação à base do robô.
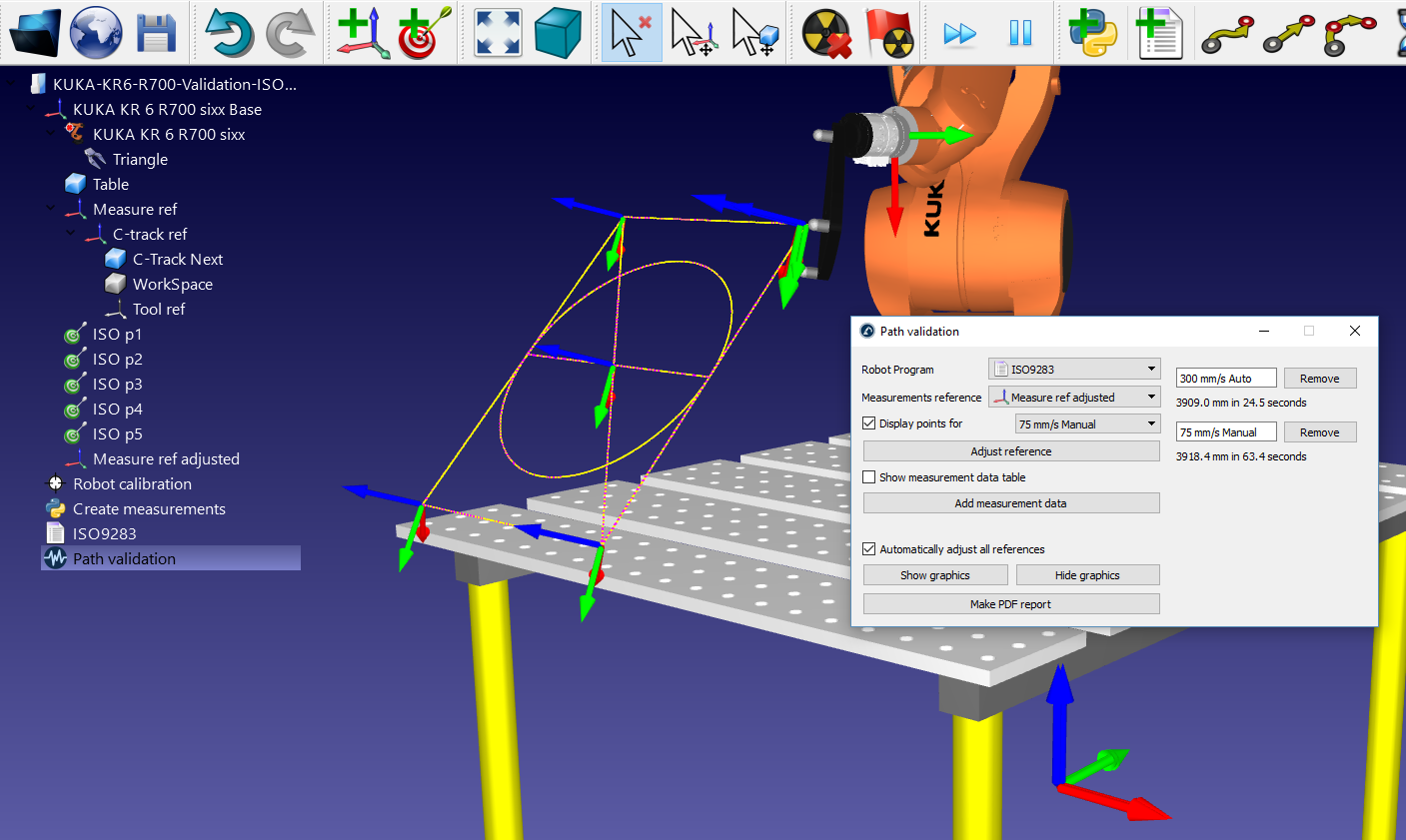
Para iniciar um projeto de validação de trajetória no RoboDK:
1.Selecione Utilitários ➔ Precisão, velocidade e aceleração da trajetória de teste (ISO 9283)
2.Selecione o programa usado para validação no menu suspenso
3.Forneça o frame de referência usado para as medições
4.Importe os dados de medição selecionando Adicionar dados de medição. Como alternativa, é possível arrastar e soltar os arquivos CSV ou TXT que contêm as medições para a janela Validação de trajetória.
Por fim, selecione Criar relatório em PDF para gerar um PDF com algumas estatísticas e gráficos sobre a precisão, a velocidade e a aceleração da trajetória. É possível executar o mesmo teste mais de uma vez em condições diferentes (velocidades diferentes, valores de arredondamento/cornagem diferentes, cargas úteis diferentes, ...) para comparar esses parâmetros no mesmo relatório.
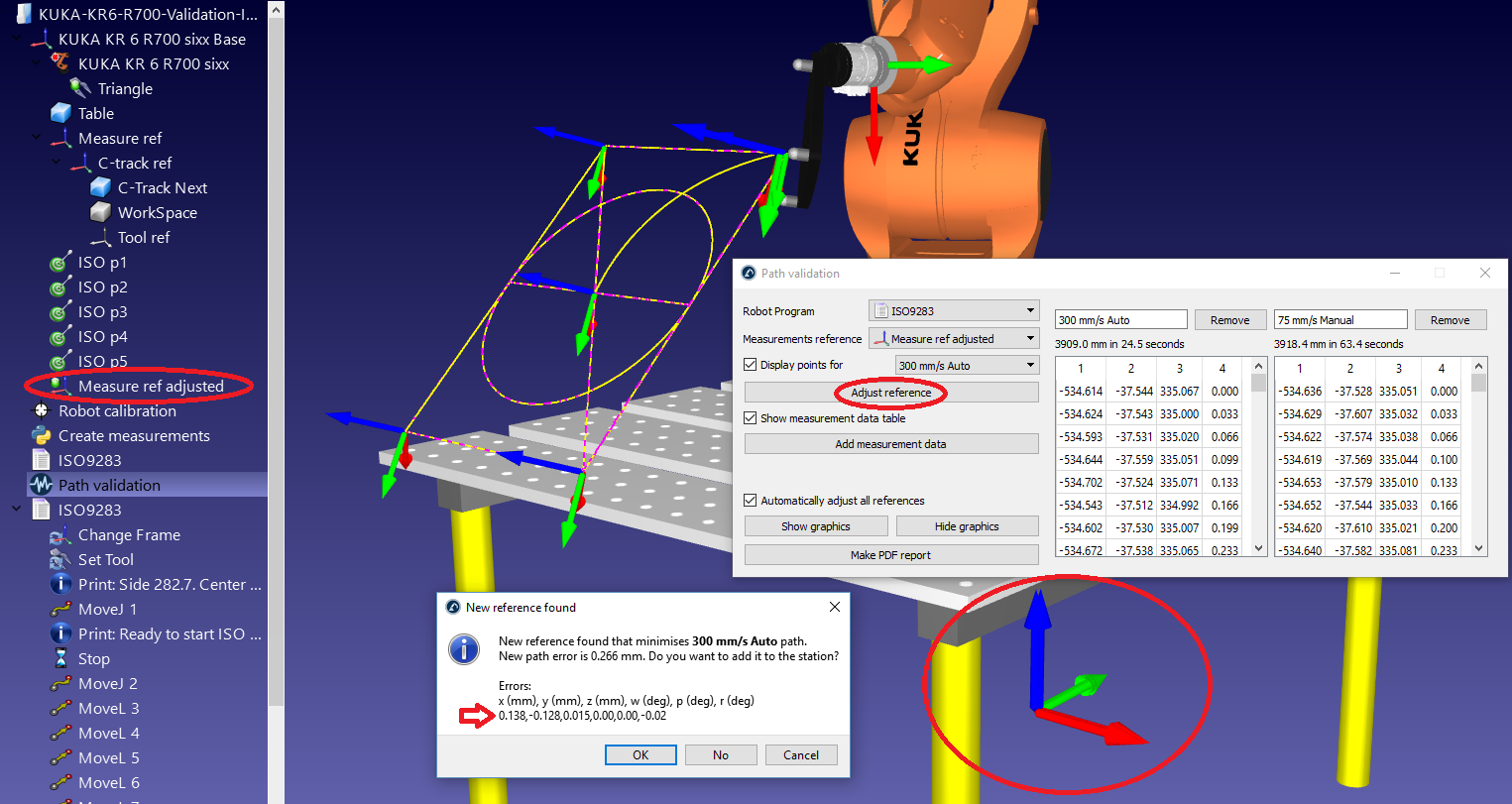
Os pontos de medição podem ser exibidos em violeta. Essas medições devem coincidir com trajetória amarelo que descreve a trajetória ideal que o robô deve seguir. As estatísticas fornecidas pelo RoboDK são as diferenças entre essas duas trajetórias.
Se o frame de referência não foi definido corretamente, os pontos de medição não correspondem à trajetória amarelo. Isso pode ocorrer por vários motivos, como uma definição ruim do frame de referência ou uma definição diferente da ferramenta. Nesse caso, a seleção de Ajustar referência tentará ajustar melhor os dois trajetórias para que as estatísticas fornecidas isolem esses desalinhamentos.