Resultados
Após a conclusão do teste de precisão da trajetória, é possível obter um relatório em PDF selecionando Criar relatório em PDF na janela Validação de trajetória. Isso gerará um PDF com algumas estatísticas e gráficos sobre a precisão, a velocidade e a aceleração da trajetória.
Os resultados do teste de amostra preparado nas seções anteriores são mostrados nas imagens a seguir. Nesse exemplo, o programa ISO9283 foi executado em dois modos diferentes:
●Modo manual a uma velocidade de 75 mm/s
●Modo automático com velocidade de 300 mm/s
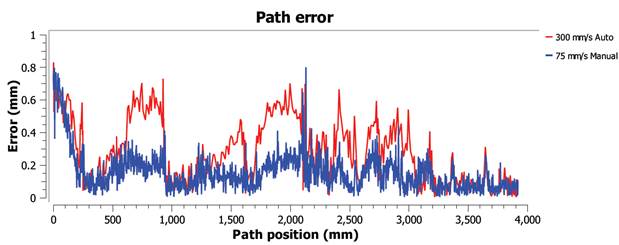
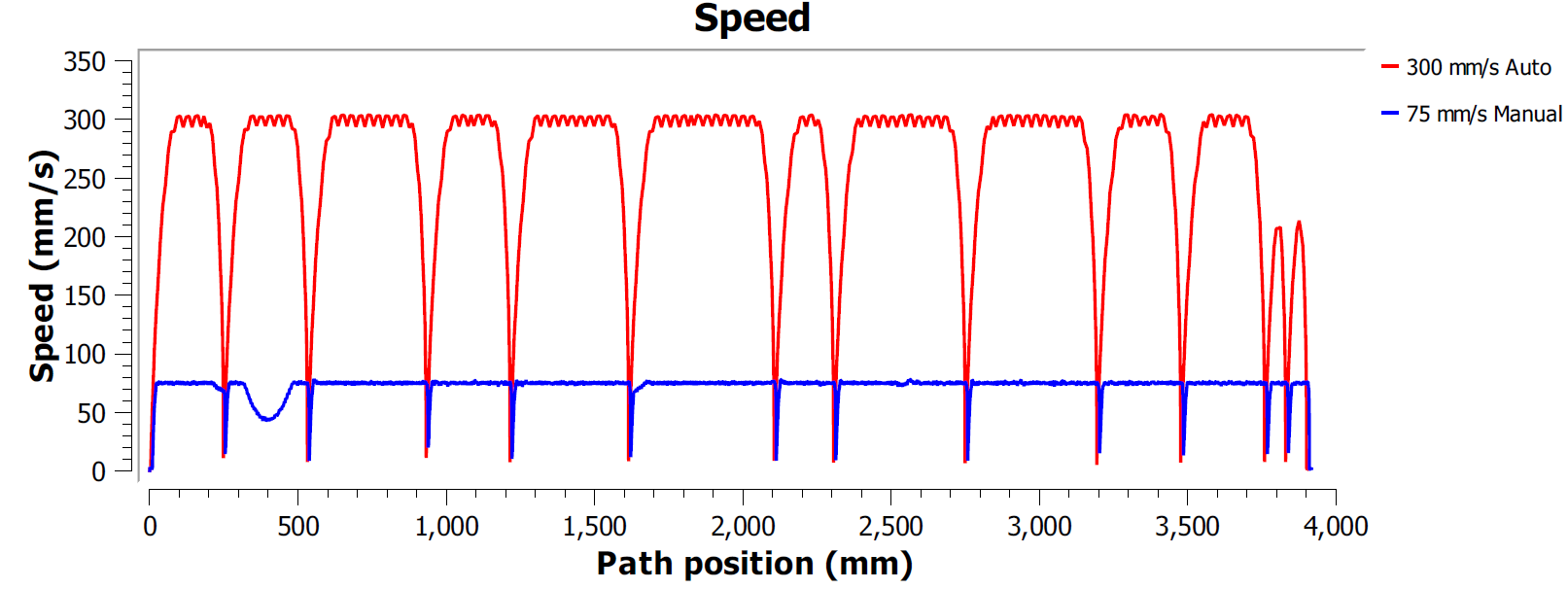
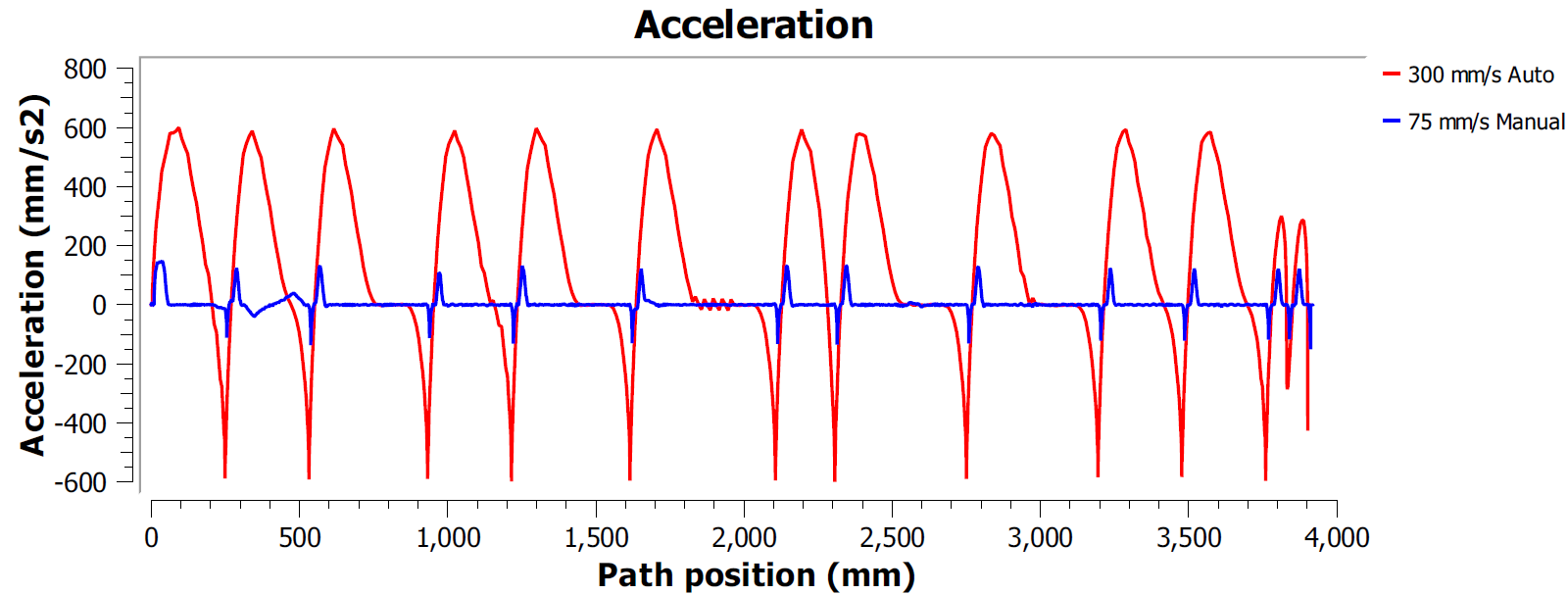
Neste exemplo, ambos os programas foram gerados usando a opção de precisão fina. Isso significa que o robô parará em cada ponto para tornar a trajetória o mais preciso possível. Nesse caso, é comum observar altas acelerações e desacelerações ao longo da trajetória porque a velocidade deve ser zero no final de cada movimento de linha ou círculo (cantos).
A maioria das marcas de robôs oferece opções de arredondamento/aproximação para evitar esse efeito, suavizando as bordas. Por exemplo, a ABB chama isso de ZoneData e permite especificar uma zona de precisão em que o controlador pode suavizar as bordas; a Fanuc chama isso de CNT e permite especificar uma porcentagem de suavização proporcional à velocidade; a opção KUKA oferece a instrução $ADVANCE com o sinalizador C_DIS e a Universal Robots permite especificar um raio de aproximação para suavizar as bordas.)
Portanto, o teste de precisão da trajetória permite encontrar um bom compromisso entre manter uma velocidade suave e, ao mesmo tempo, manter níveis aceitáveis de precisão perto das bordas da trajetória.
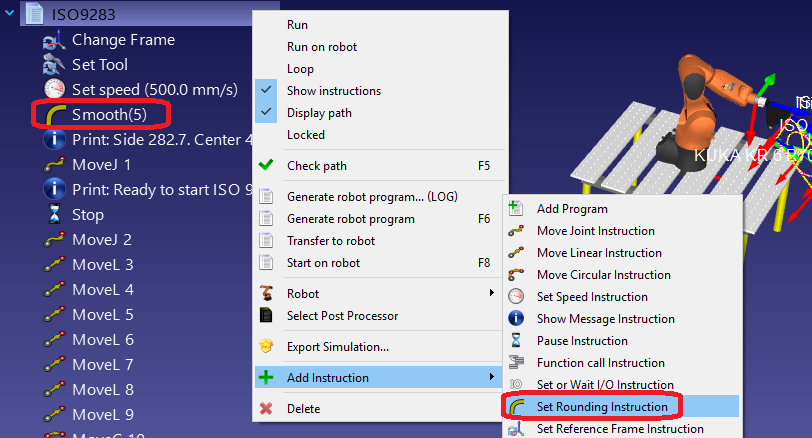
É possível especificar o parâmetro de arredondamento no RoboDK, bem como a velocidade do programa. Para editar um programa para esse teste:
1.Clique com o botão direito do mouse no programa
2.Selecione Show Instructions
3.Selecione a primeira ou a segunda instrução
4.Selecione Programa ➔ Instrução Definição de arredondamento para especificar a precisão do arredondamento
5.Selecione Programa ➔ Instrução Definição de velocidade para especificar a velocidade.