ISO9283 Performance Testing
Introdução
A norma ISO "ISO9283: Manipulating industrial robots - Performance criteria and related test methods" (Manipulação de robôs industriais - Critérios de desempenho e métodos de teste relacionados) descreve testes para avaliar o desempenho de robôs industriais. Entre outras coisas, ela fornece procedimentos para medir adequadamente a precisão da posição do robô, a repetibilidade e a precisão da trajetória.
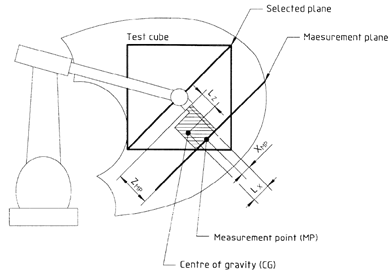
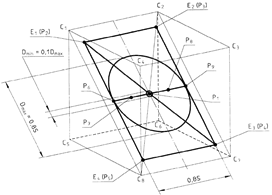
De acordo com a norma ISO9283, todos os testes devem ser realizados dentro do chamado cubo de teste ISO. O cubo de teste ISO deve ser o maior cubo que pode caber dentro do espaço de trabalho do robô. Além disso, a precisão e a repetibilidade da posição devem ser medidas 30 vezes em cinco configurações diferentes. É sabido que cinco configurações não são suficientes para fornecer uma medição adequada da precisão dos robôs modernos.
A maioria dos fabricantes de robôs só fornece a precisão posicional do robô se ele tiver sido calibrado; além disso, eles usam pelo menos 100 configurações diferentes para fornecer estatísticas adequadas de precisão de posição. Os robôs industriais são altamente repetíveis, mas não precisos; portanto, a precisão de um robô industrial pode ser aprimorada por meio da calibração.
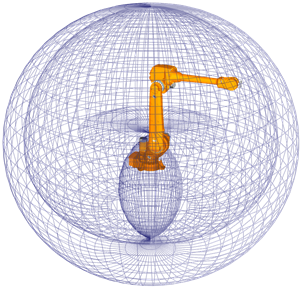
Espaço de trabalho típico de um robô nos anos 80 Espaço de trabalho típico de um robô moderno
No entanto, a norma ISO9283 é frequentemente usada para testes de repetibilidade e precisão de trajetória, mesmo que o robô não tenha sido calibrado.

Recomenda-se que você assista ao vídeo a seguir, que mostra os testes de precisão da trajetória com o RoboDK: https://youtu.be/yMQjqAQY1iE.
O RoboDK também pode ser usado para calibrar os robôs, bem como para testar seu desempenho antes e depois da calibração. Finalmente, o RoboDK também pode ser usado para testar a precisão do robô antes e depois da calibração por meio de testes de ballbar.
Requisitos
Os seguintes itens são necessários para instalar o RoboDK e realizar corretamente os testes de precisão da trajetória do robô:
1.Um ou mais robôs industriais
2.Um sistema de medição: qualquer laser tracker, como Leica, API ou Faro, ou CMM óptico, como a estereocâmera C-Track da Creaform, deve funcionar
3.O software RoboDK deve ser instalado e é necessária uma licença apropriada para o teste ISO9283. Para licenças de rede, é necessário ter uma conexão com a Internet para verificar a licença. Para instalar ou atualizar o RoboDK para um teste de desempenho ISO9283:
a.Faça o download do RoboDK na seção de downloads
https://robodk.com/download.
b.Configure o driver para o sistema de medição. Entre em contato conosco para obter os arquivos de driver necessários para a pasta:
C:/RoboDK/api/ .
Configuração off-line
Recomenda-se que você construa um ambiente virtual da configuração real no RoboDK (configuração off-line) para preparar a trajetória e as posições para o teste. Isso pode ser feito antes de ter o robô e o tracker, usando apenas um computador com o RoboDK instalado. Os exemplos de configuração de calibração e validação de trajetória do RoboDK podem ser baixados da pasta:
https://robodk.com/stations#filter?feature=calibration-project.
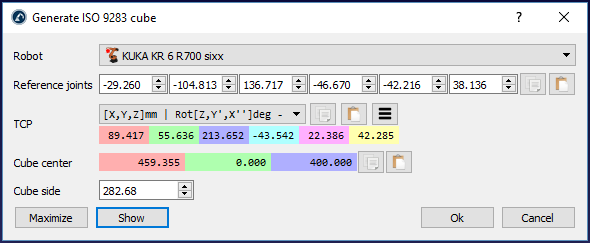
O RoboDK tem um utilitário para gerar as configurações e a trajetória recomendada, conforme estabelecido pelo padrão ISO9283. Para usar esse utilitário:
1.Utilitários➔ Criar cubo ISO 9283 (pontos e trajetória)
2.Digite as posições de eixo de referência (posição do robô em que a ferramenta está voltada para o tracker)
3.Ajuste a posição e o tamanho do cubo
4.Selecione OK
Isso criará os 5 pontos descritos pela norma ISO, bem como a trajetória recomendado para o teste de precisão da trajetória. Esses pontos e a trajetória permanecem dentro de um cubo localizado na frente do robô. Podemos definir o lado desejado do cubo, bem como mover o centro (ponto "ISO p1") e as juntas de referência que definirão a orientação da trajetória. Também é possível maximizar o tamanho do cubo para encontrar o maior cubo que caiba no espaço de trabalho do robô.
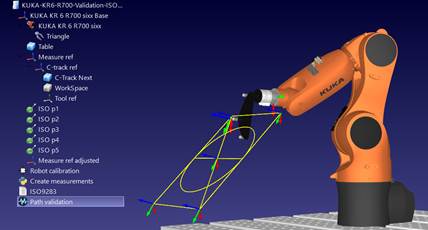
Uma estação de amostra com opções de calibração e validação do robô é mostrada na figura a seguir.
Precisão e repetibilidade de posição
O mesmo procedimento usado para a validação da precisão da posição durante a calibração do robô também pode ser usado para o teste de precisão da posição. Informações e estatísticas sobre a repetibilidade também podem ser obtidas se as medições forem feitas sequencialmente no mesmo grupo de pontos.
A única diferença entre realizar apenas a validação ou a calibração e a validação é que a primeira opção não exige uma licença de calibração de robô (apenas uma licença de teste ISO9283).
Para realizar essas validações, você deve selecionar o menu:
●Utilidades ➔ Precisão e repetibilidade da posição de teste (ISO 9283)
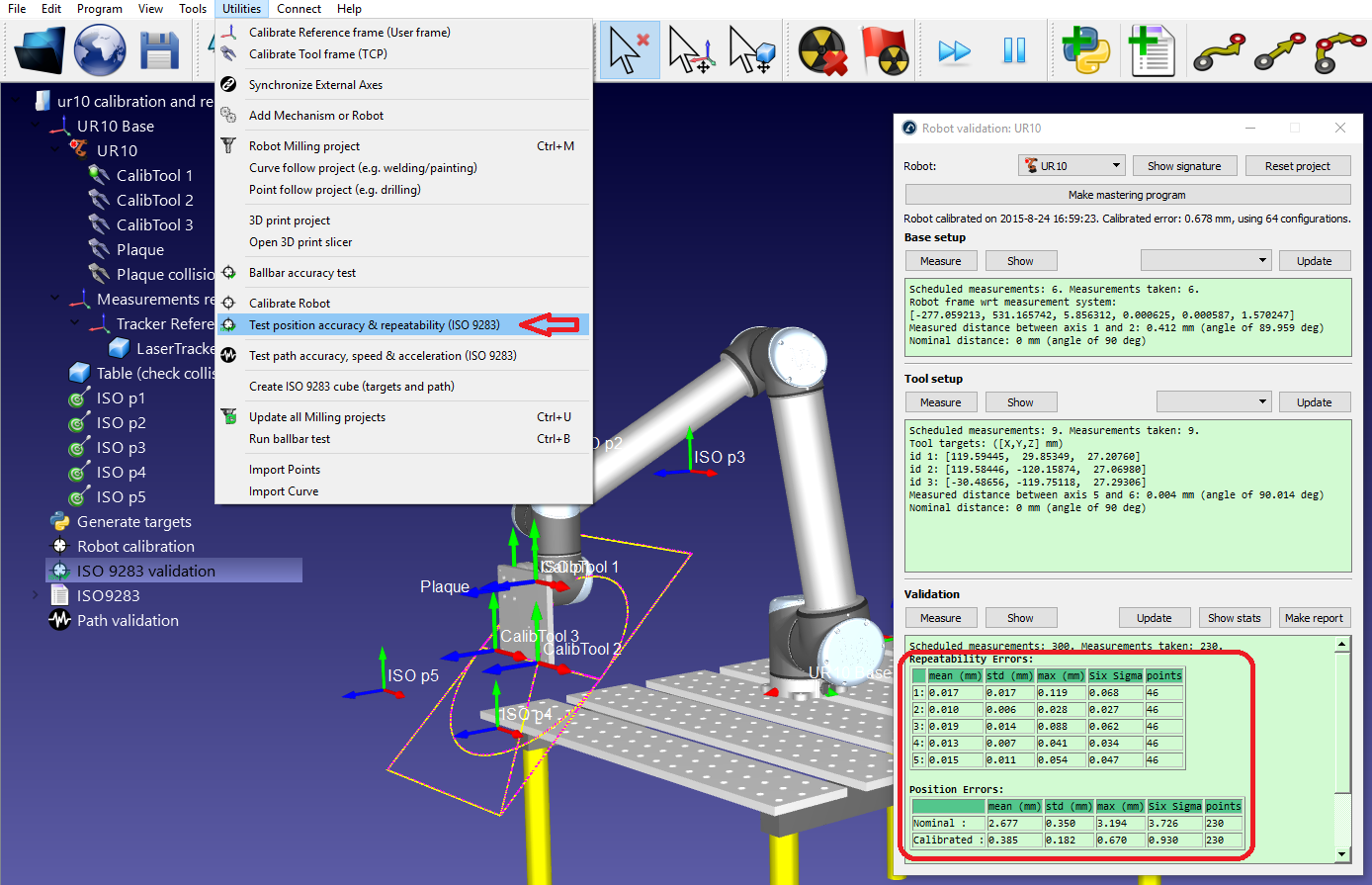
Esses testes exigem a identificação da estrutura da base do robô em relação à estrutura de referência das medições (configuração da base) e da estrutura da ferramenta em relação ao flange do robô (configuração da ferramenta).
É possível obter um relatório em PDF quando os testes de precisão e repetibilidade da posição forem concluídos.
Precisão da trajetória
Para realizar testes de precisão de trajetória, é necessário ter um programa de robô criado com o RoboDK, como o programa ISO9283 criado pelo utilitário Create ISO cube. Podemos gerar o programa de robô específico do fornecedor selecionando o programa e pressionando F6 (ou selecionando Programa ➔ Gerar programa). Como alternativa, é possível usar qualquer outro programa criado no RoboDK (como uma linha reta, um círculo ou um quadrado).
Também é necessário ter um sistema de medição que possa rastrear a posição do efetor final e fornecer as medições de posição em relação a uma estrutura de referência. É necessário usar os procedimentos de configuração da base e da ferramenta no RoboDK (necessários para realizar a calibração ou os testes de precisão da posição) para identificar a estrutura da base do robô e a estrutura da ferramenta.
Os dados de medição devem ser adquiridos durante a movimentação do robô ao longo do programa. As medições devem ser registradas continuamente, usando o software padrão fornecido pelo fabricante do sistema de medição. É necessário exportar as medições como um arquivo CSV ou TXT. Esses arquivos devem conter dados de posição XYZ, bem como o registro de data e hora de cada medição. Opcionalmente, essas medições podem conter a orientação da ferramenta em relação à base do robô.
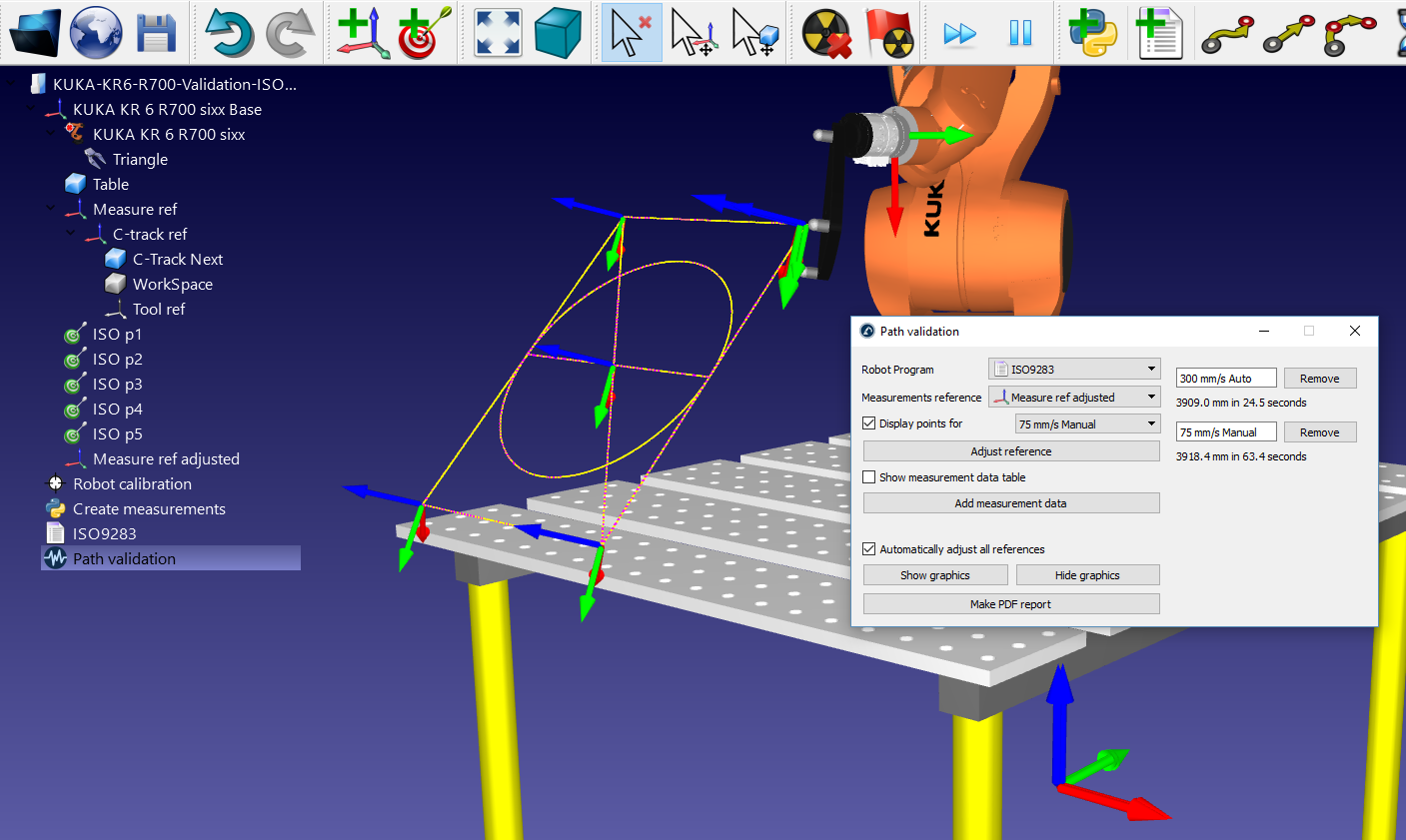
Para iniciar um projeto de validação de trajetória no RoboDK:
1.Selecione Utilitários ➔ Precisão, velocidade e aceleração da trajetória de teste (ISO 9283)
2.Selecione o programa usado para validação no menu suspenso
3.Forneça o frame de referência usado para as medições
4.Importe os dados de medição selecionando Adicionar dados de medição. Como alternativa, é possível arrastar e soltar os arquivos CSV ou TXT que contêm as medições para a janela Validação de trajetória.
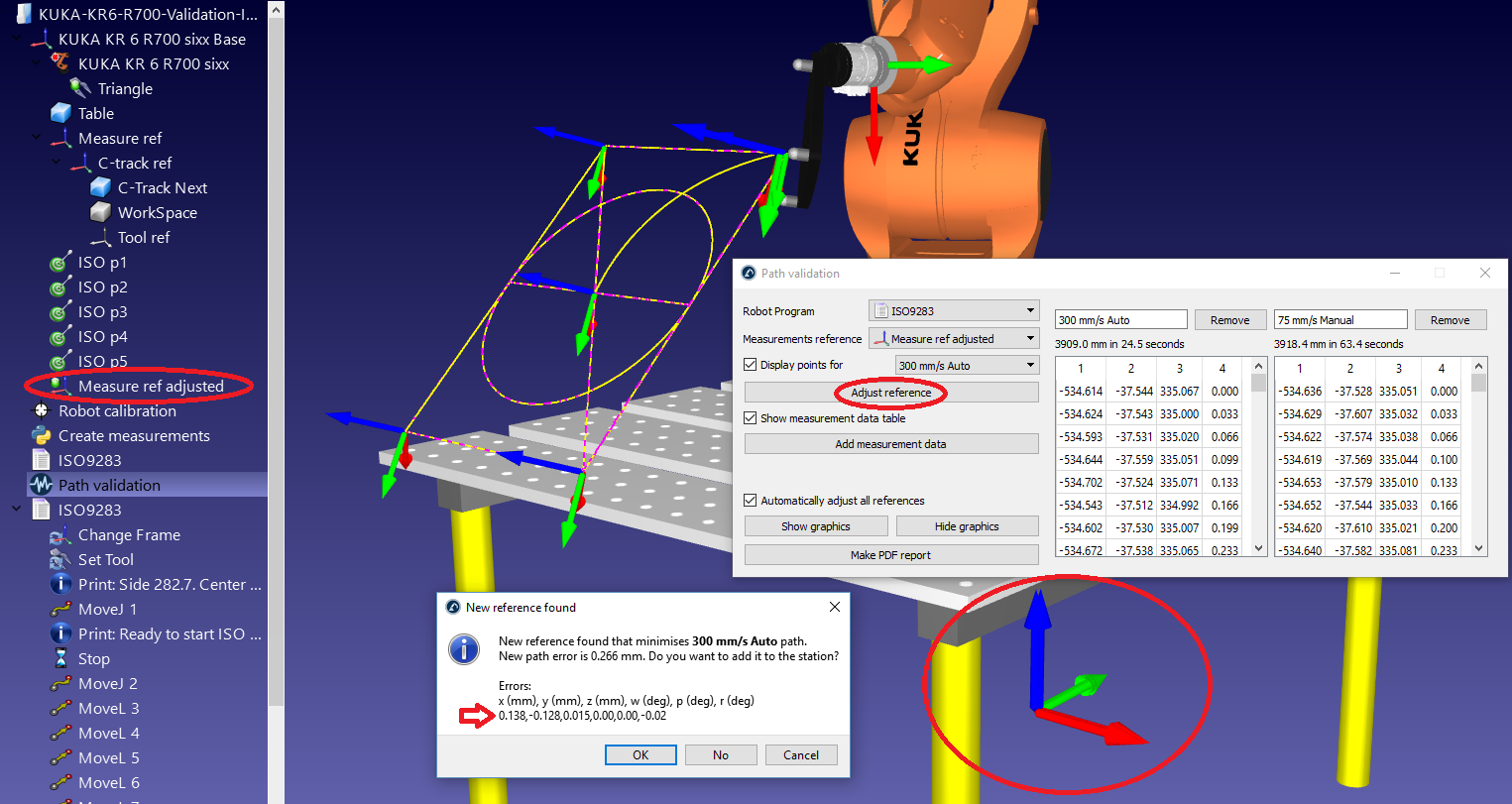
Por fim, selecione Criar relatório em PDF para gerar um PDF com algumas estatísticas e gráficos sobre a precisão, a velocidade e a aceleração da trajetória. É possível executar o mesmo teste mais de uma vez em condições diferentes (velocidades diferentes, valores de arredondamento/cornagem diferentes, cargas úteis diferentes, ...) para comparar esses parâmetros no mesmo relatório.
Os pontos de medição podem ser exibidos em violeta. Essas medições devem coincidir com trajetória amarelo que descreve a trajetória ideal que o robô deve seguir. As estatísticas fornecidas pelo RoboDK são as diferenças entre essas duas trajetórias.
Se o frame de referência não foi definido corretamente, os pontos de medição não correspondem à trajetória amarelo. Isso pode ocorrer por vários motivos, como uma definição ruim do frame de referência ou uma definição diferente da ferramenta. Nesse caso, a seleção de Ajustar referência tentará ajustar melhor os dois trajetórias para que as estatísticas fornecidas isolem esses desalinhamentos.
Resultados
Após a conclusão do teste de precisão da trajetória, é possível obter um relatório em PDF selecionando Criar relatório em PDF na janela Validação de trajetória. Isso gerará um PDF com algumas estatísticas e gráficos sobre a precisão, a velocidade e a aceleração da trajetória.
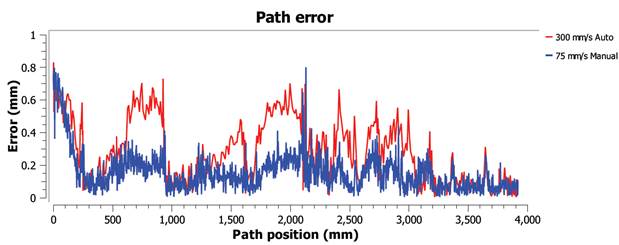
Os resultados do teste de amostra preparado nas seções anteriores são mostrados nas imagens a seguir. Nesse exemplo, o programa ISO9283 foi executado em dois modos diferentes:
●Modo manual a uma velocidade de 75 mm/s
●Modo automático com velocidade de 300 mm/s
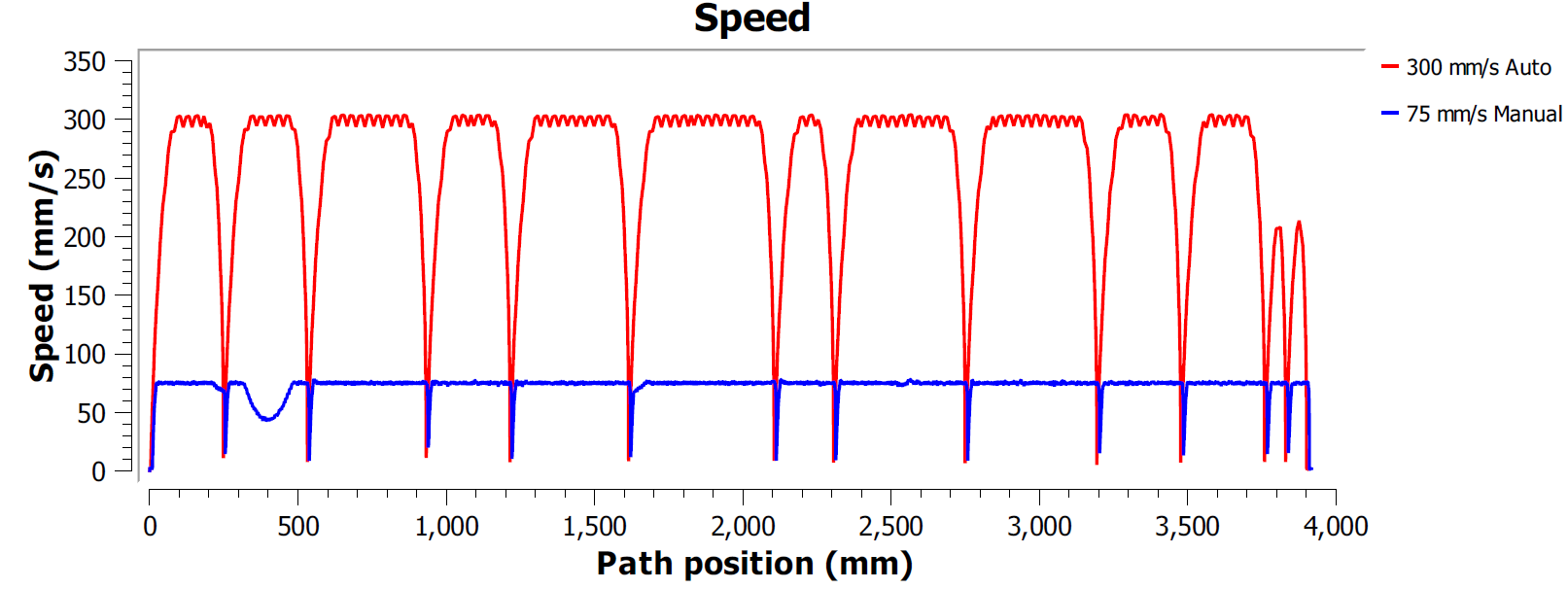
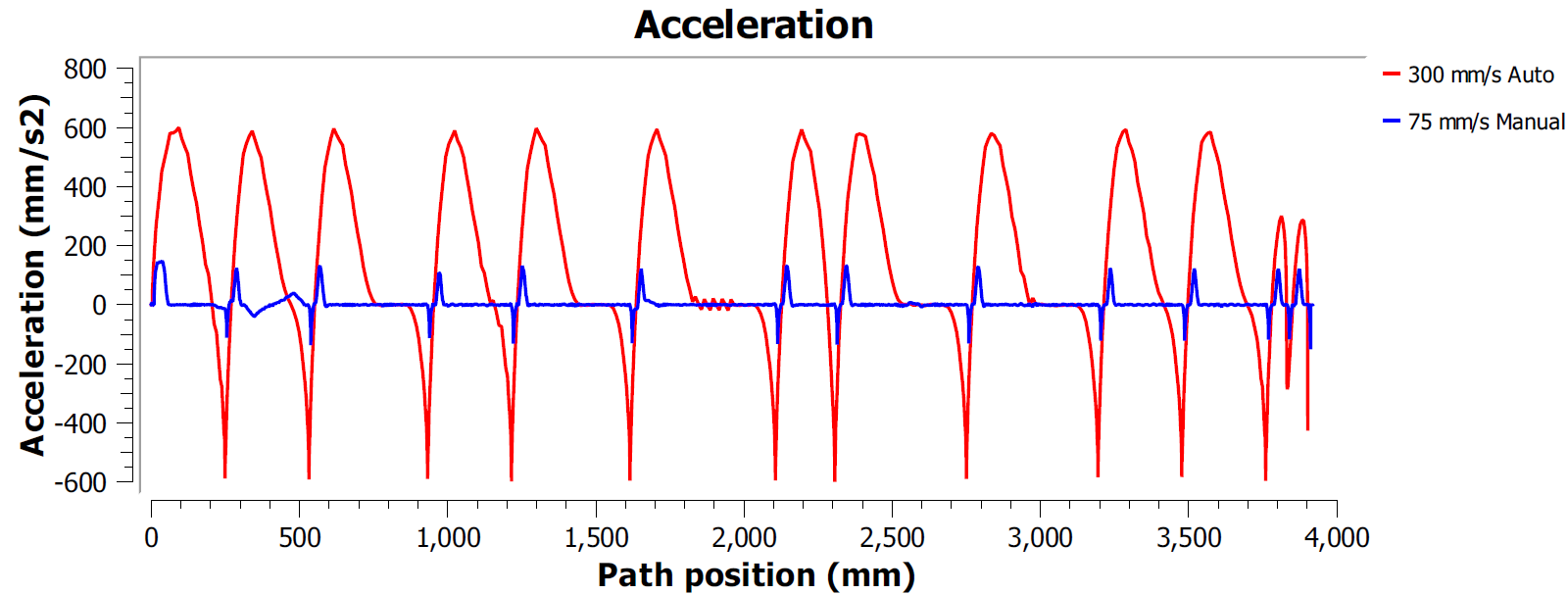
Neste exemplo, ambos os programas foram gerados usando a opção de precisão fina. Isso significa que o robô parará em cada ponto para tornar a trajetória o mais preciso possível. Nesse caso, é comum observar altas acelerações e desacelerações ao longo da trajetória porque a velocidade deve ser zero no final de cada movimento de linha ou círculo (cantos).
A maioria das marcas de robôs oferece opções de arredondamento/aproximação para evitar esse efeito, suavizando as bordas. Por exemplo, a ABB chama isso de ZoneData e permite especificar uma zona de precisão em que o controlador pode suavizar as bordas; a Fanuc chama isso de CNT e permite especificar uma porcentagem de suavização proporcional à velocidade; a opção KUKA oferece a instrução $ADVANCE com o sinalizador C_DIS e a Universal Robots permite especificar um raio de aproximação para suavizar as bordas.)
Portanto, o teste de precisão da trajetória permite encontrar um bom compromisso entre manter uma velocidade suave e, ao mesmo tempo, manter níveis aceitáveis de precisão perto das bordas da trajetória.
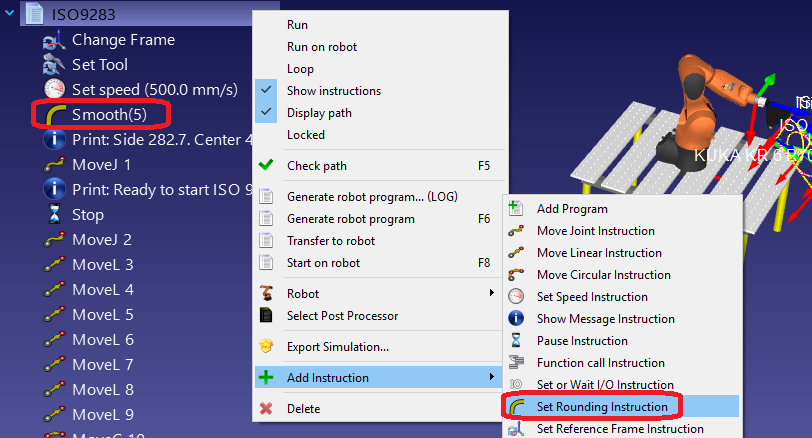
É possível especificar o parâmetro de arredondamento no RoboDK, bem como a velocidade do programa. Para editar um programa para esse teste:
1.Clique com o botão direito do mouse no programa
2.Selecione Show Instructions
3.Selecione a primeira ou a segunda instrução
4.Selecione Programa ➔ Instrução Definição de arredondamento para especificar a precisão do arredondamento
5.Selecione Programa ➔ Instrução Definição de velocidade para especificar a velocidade.