Robôs ABB
O RoboDK suporta todos os robôs ABB programados em linguagem RAPID, incluindo arquivos PRG e MOD (controladores de robôs IRC5, S4 e S4C). Esta documentação é baseada no controlador de robô IRC5 ABB.
O RoboDK tratará automaticamente da divisão automática do programa do robô para programas grandes, dependendo do pós-processador que você selecionar.
As seções a seguir demonstram operações típicas usando um terminal de programação de robô ABB, por exemplo, para preparar um novo programa de robô no RoboDK e transferi-lo para o robô.
Transferir um programa de robô
Siga estas etapas para carregar um módulo de programa (arquivo MOD) de uma unidade USB para o controlador de robô ABB IRC5.
1.Selecione ABB ➔ Program editor
2.Selecione Modules, na parte superior da tela
3.Selecione File➔ Load module (se você estiver iniciando um novo projeto, não é importante que o ponteiro do programa/PP seja perdido)
4.Selecione o arquivo MOD no disco USB
5.Selecione OK
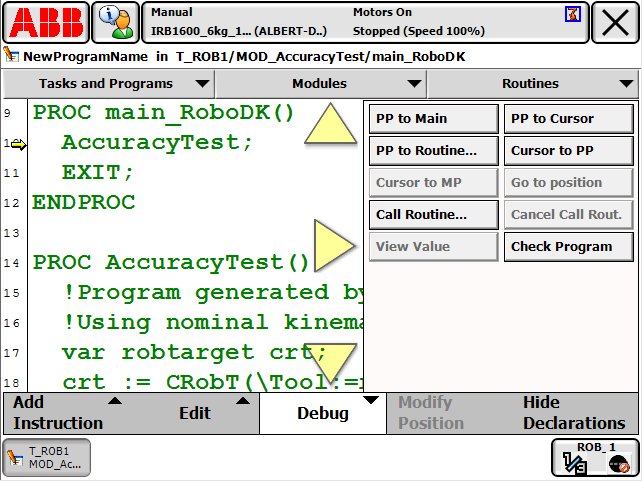
Inicie um programa de robô
Siga estas etapas para iniciar um programa de robô específico em seu controlador de robô ABB IRC5.
1.Mude a chave do controlador para o modo manual. A mensagem "Manual" na barra de menu superior deve ser exibida.
2.Selecione: ABB➔ Program editor➔ Debug➔ PP to routine
3.Selecione o programa gerado pelo RoboDK. Dependendo do pós-processador utilizado, talvez você já tenha a rotina Main em seu módulo.
4.Mantenha pressionado o interruptor de "homem morto" no terminal de programação se estiver operando no modo manual. A mensagem Motors On como o status do robô deve estar visível e a luz laranja do robô deve estar acesa.
5.Selecione o botão play no terminal de programação para iniciar o programa
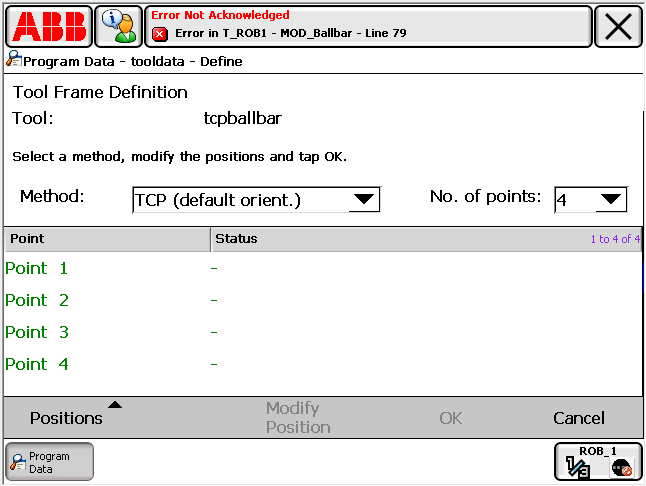
Recuperando o TCP
As etapas a seguir permitem criar ou modificar as ferramentas do robô (TCP, também conhecidas como tooldata na programação de robôs da ABB):
1.Selecione ABB➔ Program data➔ tooldata (clique duas vezes)
2.É possível criar ou modificar variáveis de ferramentas existentes
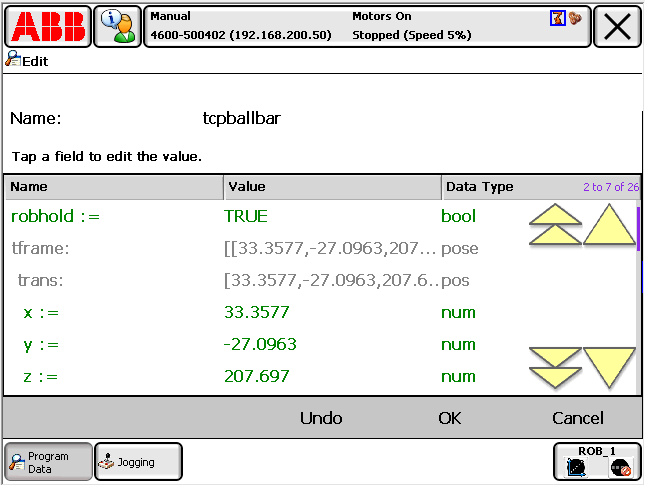
3.Uma vez que a ferramenta tenha sido definida, os valores X, Y e Z do TCP podem ser recuperados
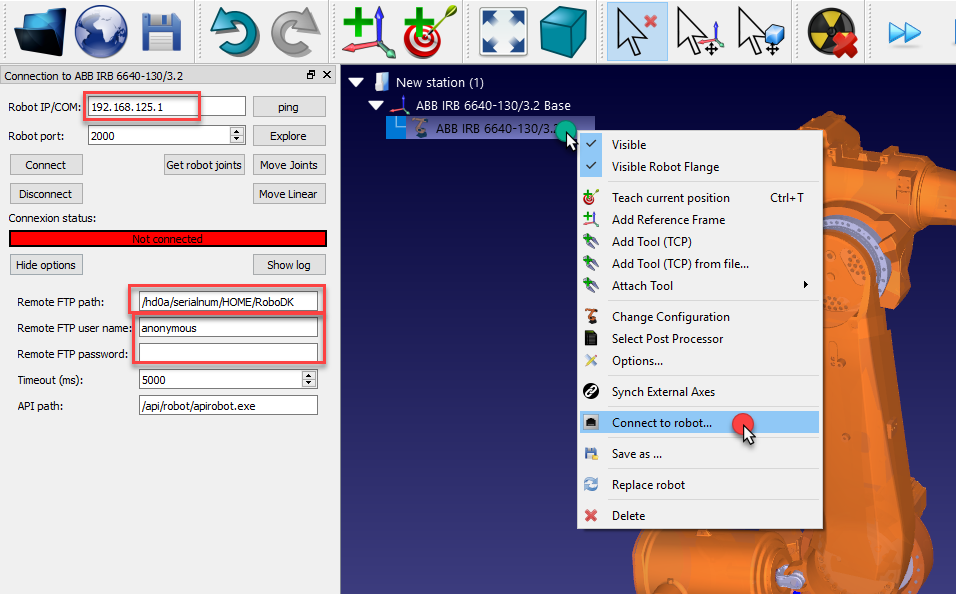
Transferência de programas via FTP
Os programas podem ser facilmente transferidos via FTP do RoboDK para robôs ABB:
1.Clique com o botão direito do mouse no robô no RoboDK
2.Selecione Conectar ao robô...
3.Digite o IP do robô
4.Digite o caminho do FTP remoto.
O caminho completo pode ser recuperado no pingente de ensino ou usando o FileZilla FTP Client.
5.Digite as credenciais de FTP (anônimas por padrão)
Quando o programa do RoboDK estiver pronto para ser enviado ao robô, você poderá enviar o programa ao robô:
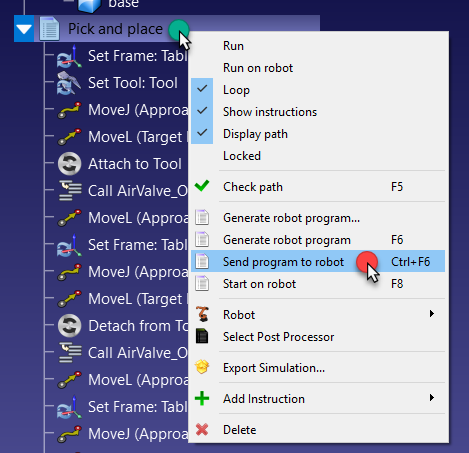
1.Clique com o botão direito do mouse em um programa no RoboDK
2.Selecione Enviar programa para o robô (Ctrl+F6)
Isso gerará o programa e tentará transferi-lo para o controlador do robô. Aparecerá uma janela mostrando se a transferência FTP foi bem-sucedida ou não.
Quando os programas são transferidos por FTP em tempo real, eles precisam ser carregados usando a programação RAPID no lado do robô. O exemplo a seguir executará o programa main_RoboDK a partir de um módulo chamado MOD_Pick_and_place:
MÓDULO RoboDK_FTP_Run_Program
! Digite o caminho para uma pasta com direitos de acesso de gravação. Exemplo:
CONST string PATH_ROBODK := "/hd0a/robot-serial-num/HOME/RoboDK";
PERS string ftp_program_loaded := ";
PROC Main()
FTP_Run_Program;
ENDPROC
PROC FTP_Run_Program()
var num module_id := -1;
WHILE module_id <= 0 DO
TPErase;
TPReadNum module_id, "Digite o programa a ser executado. Por exemplo: para executar Prog2 no módulo Prog2.mod, digite 2.";
ENDWHILE
FTP_Run_Program_ID(module_id);
ENDPROC
PROC FTP_Run_Program_ID(num module_id)
VAR string path_module := "";
VAR string mod_to_unload;
IF module_id <= 0 THEN
RETURN;
ENDIF
path_module := PATH_ROBODK + "/Prog" + NumToStr(module_id, 0) + ".mod";
IF StrLen(ftp_program_loaded) > 0 THEN
mod_to_unload := ftp_program_loaded;
ftp_program_loaded := "";
UnLoad mod_to_unload;
ENDIF
Load path_module;
ftp_program_loaded := path_module;
TPWrite "Iniciando o programa: " + path_module;
Chame o programa principal do módulo enviado e carregado
! %"main_RoboDK"%;
Chame o programa numerado (ele deve ter o mesmo efeito)
%"Prog "+NumToStr(module_id,0)%;
TPWrite "Programa concluído";
ENDPROC
ENDMODULE
Driver RoboDK para ABB
Você pode estabelecer uma conexão on-line entre o RoboDK e o robô ABB para mover o robô automaticamente a partir de um PC conectado usando o RoboDK.
Isso permite que você use a opção Executar no robô do RoboDK para programação e depuração on-line. A conexão pode ser estabelecida por meio de uma conexão Ethernet (TCP/IP) ou uma conexão serial (RS232).
Os drivers do robô oferecem uma alternativa à programação off-line. Os drivers do robô permitem que você execute uma simulação diretamente no robô (Programação on-line). Mais informações estão disponíveis na seção Robot Drivers.
Siga estas etapas para configurar o driver do RoboDK para os robôs ABB:
1.Conecte o computador ao robô usando um cabo Ethernet (ou conexão RS232 se estiver planejando usar a conexão serial).
2.Faça o download dos arquivos do driver MOD para a ABB na área do cliente.
3.Carregue o módulo RDK_DriverSocket.mod no robô (usando uma unidade USB, transferência FTP ou ABB RobotStudio). Ele deve ser usado como a tarefa principal e esse módulo já contém a chamada do programa Main.
Como alternativa, use o módulo RDK_DriverSerial.mod se você preferir usar a conexão RS232.
Siga estas etapas no pendente de aprendizagem ABB para carregar o programa a partir do pendente de aprendizagem:
a.Selecione ABB➔ Program Editor
b.Selecione Tasks and Programs (na parte superior)
c.Selecione Show Modules (na parte inferior)
d.Selecione File➔ Load Module... (selecione YES para perder o ponteiro do programa)
e.Selecione o arquivo mod e, em seguida, selecione OK.
4.Execute o programa principal (você encontrará o programa principal em RoboDK_Driver.mod).
CONST string SERVER_IP := "192.168.125.1";
A porta de comunicação padrão do programa fornecido é 2000, mas ela também pode ser alterada.