Brooks PreciseFlex 100 XZTS
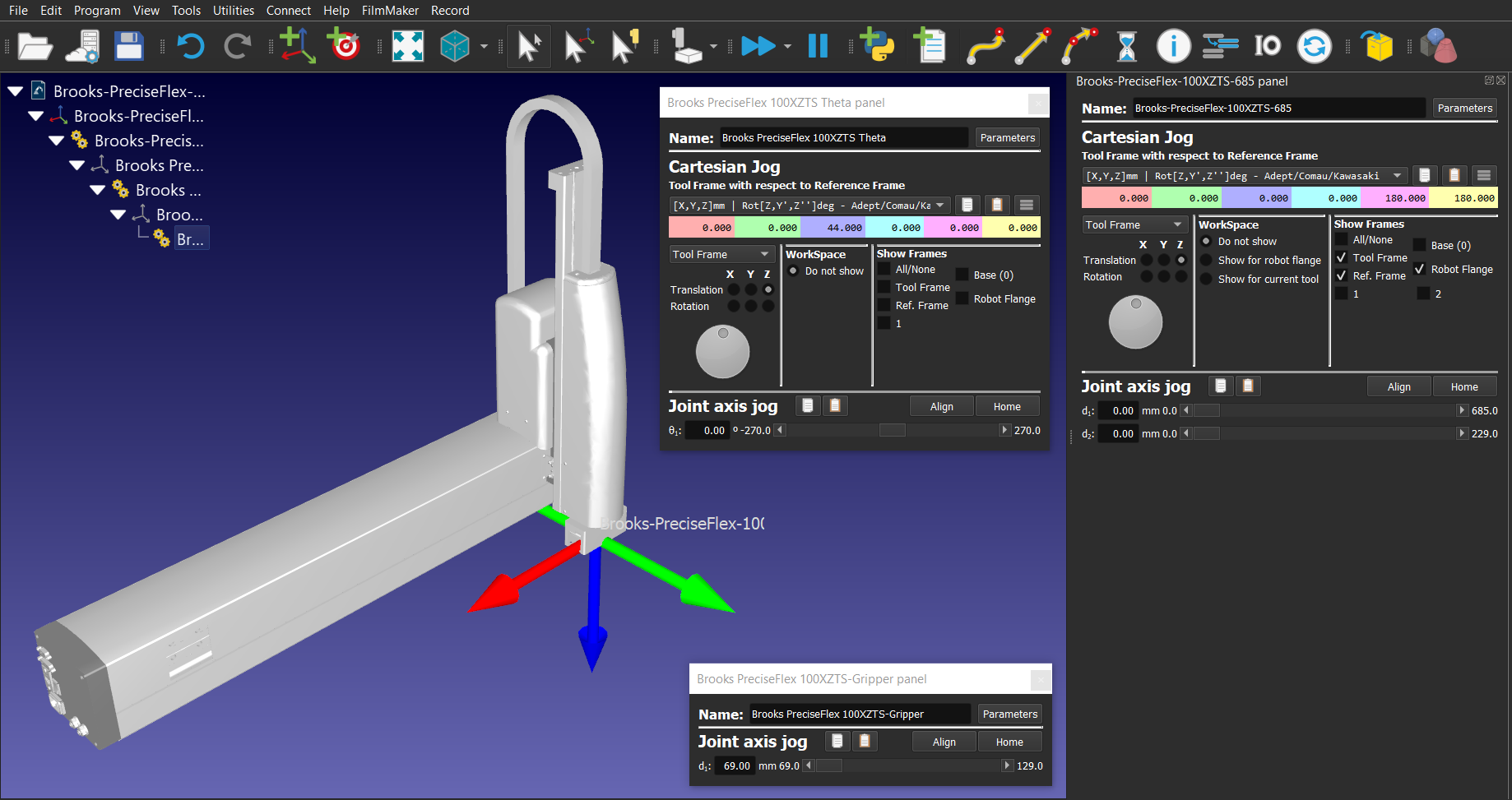
Da mesma forma que o robô Brooks PreciseFlex c8A, os robôs Brooks PreciseFlex 100 XZTS foram desenvolvidos pela combinação de dois modelos de robôs, aos quais foi adicionada a garra. Isso permite lidar com os três graus de liberdade do braço (movimentos lineares ao longo dos eixos X e Z e rotação Theta em torno do eixo Z) e com o grau de liberdade da garra.
O Brooks PreciseFlex 100 XZTS com 685 mm de amplitude de movimento no eixo X é mostrado abaixo.
Assim como o robô Brooks PreciseFlex c8A, os robôs Brooks PreciseFlex 100 XZTS não são compatíveis com o pós-processador.
Se for necessário adicionar um ponto central da ferramenta (TCP), ele deverá ser definido com relação ao flange do mecanismo Theta (rotação em torno do eixo Z) do robô.
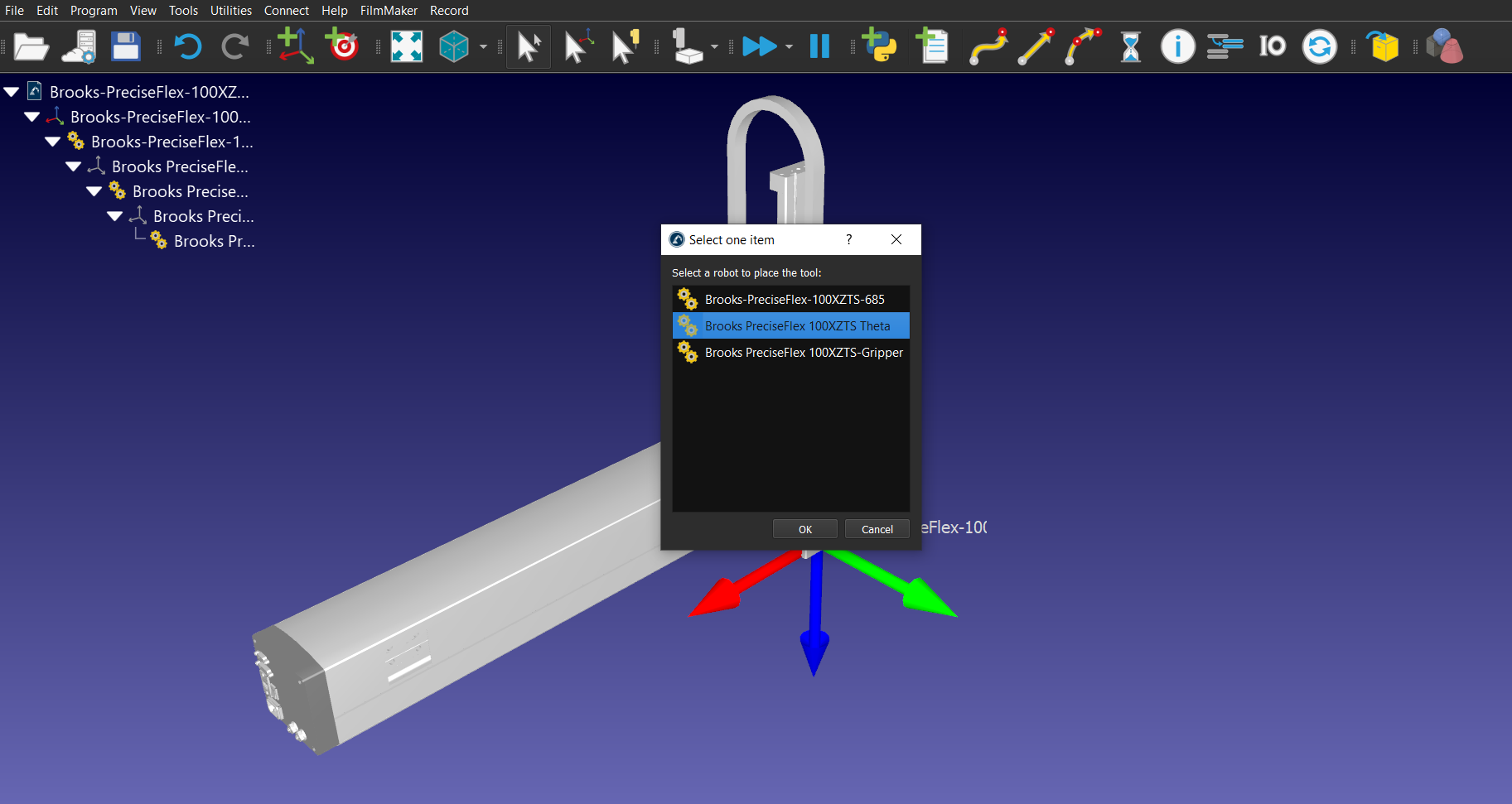
Observe as informações relatadas no parágrafo "Tool Center Point (TCP)" para definir a pose do TCP conforme configurado no controlador do robô.