Brooks PreciseFlex c8A
Dada a cinemática exclusiva do robô PreciseFlex c8A da Brooks, seu modelo foi desenvolvido no RoboDK combinando dois modelos de robôs para lidar com os 3+3 graus de liberdade do braço robótico.
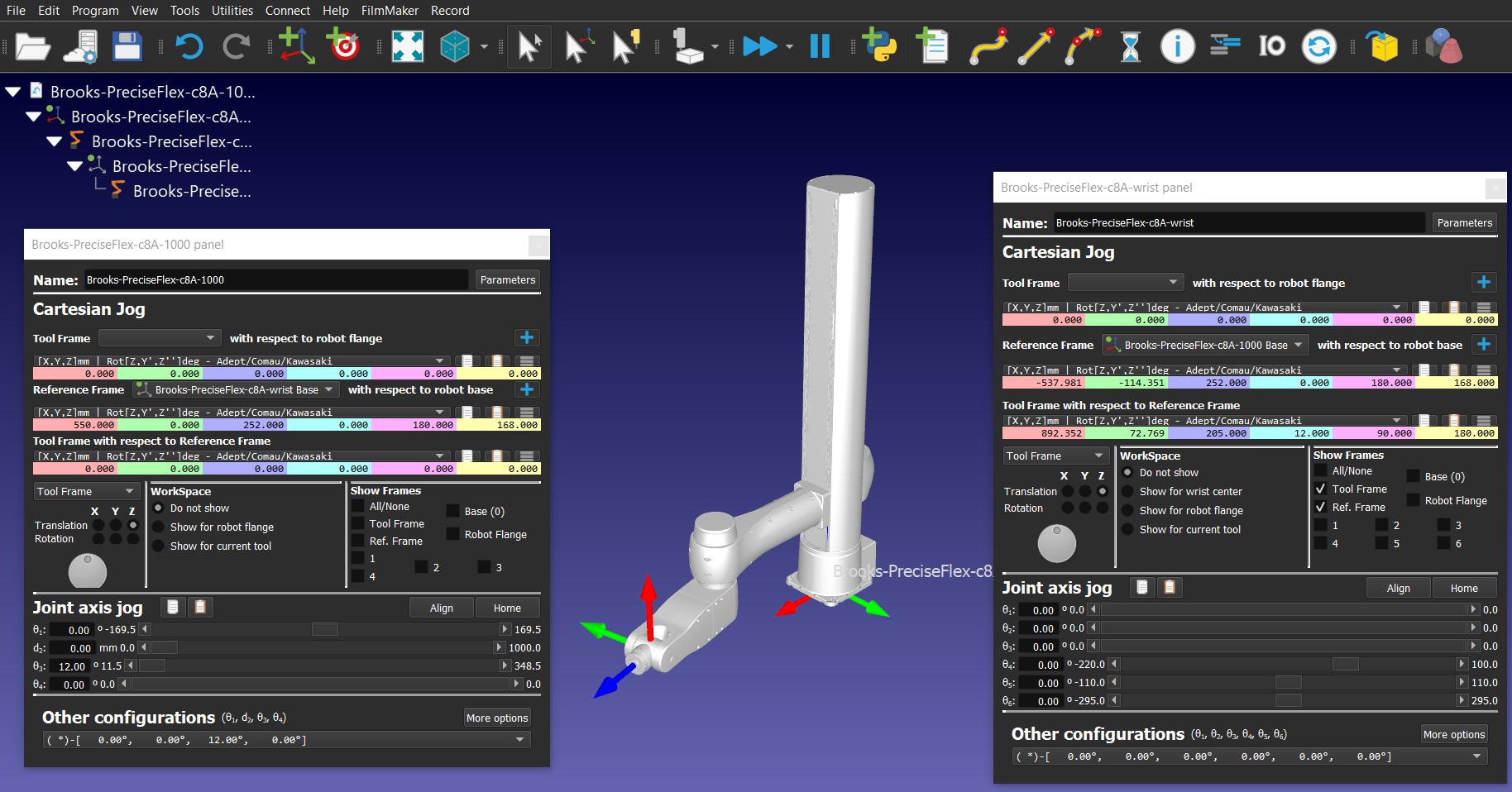
Esse desenvolvimento faz com que não seja possível usar os modelos dos robôs PreciseFlex c8A da Brooks em combinação com o pós-processador da Brooks.
Os robôs Brooks PreciseFlex c8A não são compatíveis com nenhuma das garras Brooks PreciseFlex IntelliGuide.
Se for necessário adicionar um ponto central da ferramenta (TCP), ele deverá ser definido com relação ao flange do mecanismo de pulso do robô. Observe as informações relatadas no parágrafo "Tool Center Point (TCP)" para definir a pose do TCP conforme configurado no controlador do robô.