Gripper
Consulte a seção anterior Simulação do gripper para saber como definir corretamente as instruções do gripper compatíveis com o pós-processador. Essa abordagem define corretamente os locais no projeto GPL, evitando movimentos inesperados do eixo ou eixos da garra.
As garras Brooks PreciseFlex IntelliGuide disponíveis são:
1.Brooks PreciseFlex IntelliGuide s23
2.Brooks PreciseFlex IntelliGuide s60
3.Brooks PreciseFlex IntelliGuide s23D
4.Brooks PreciseFlex IntelliGuide v23
5.Brooks PreciseFlex IntelliGuide v60
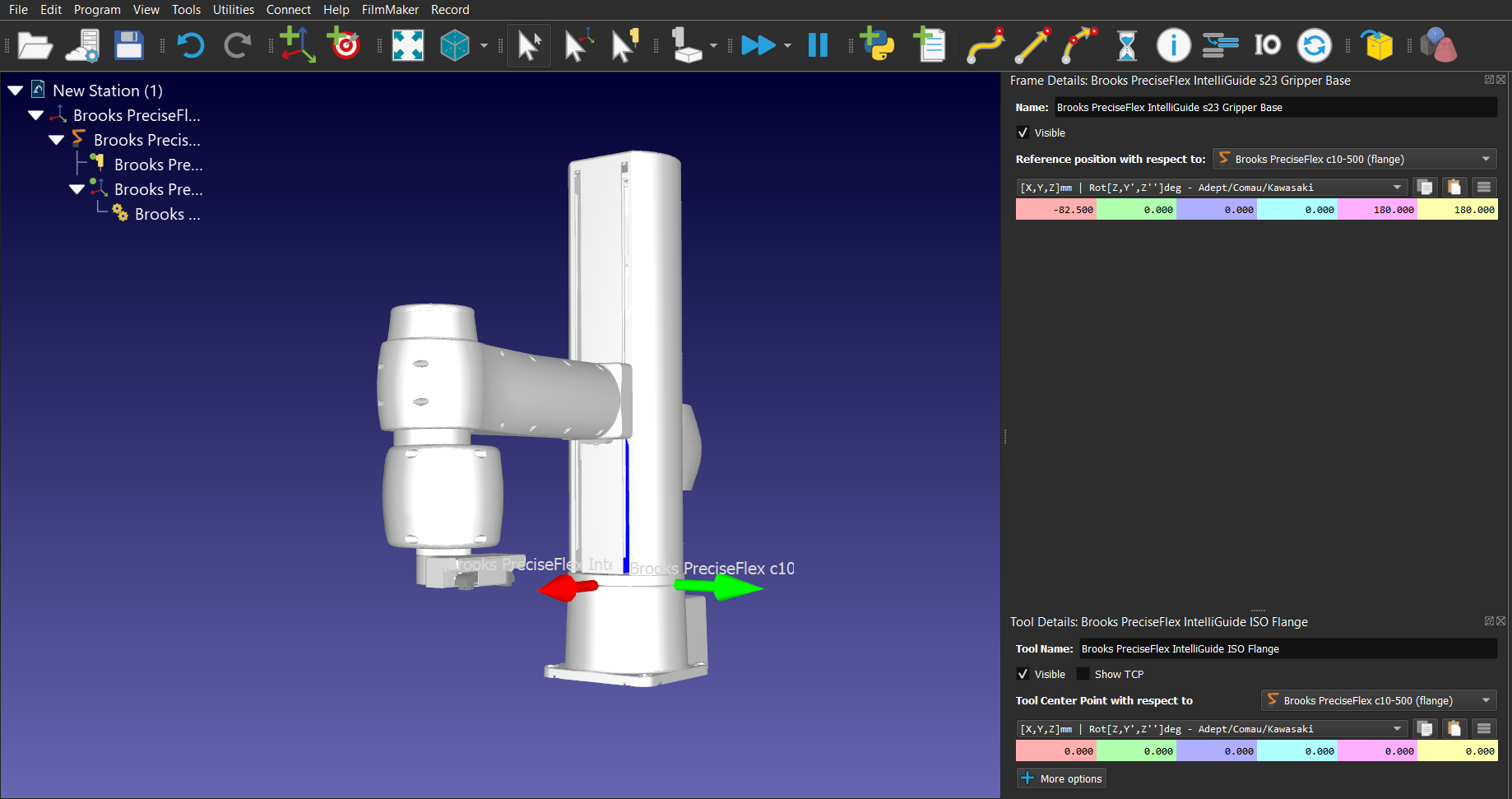
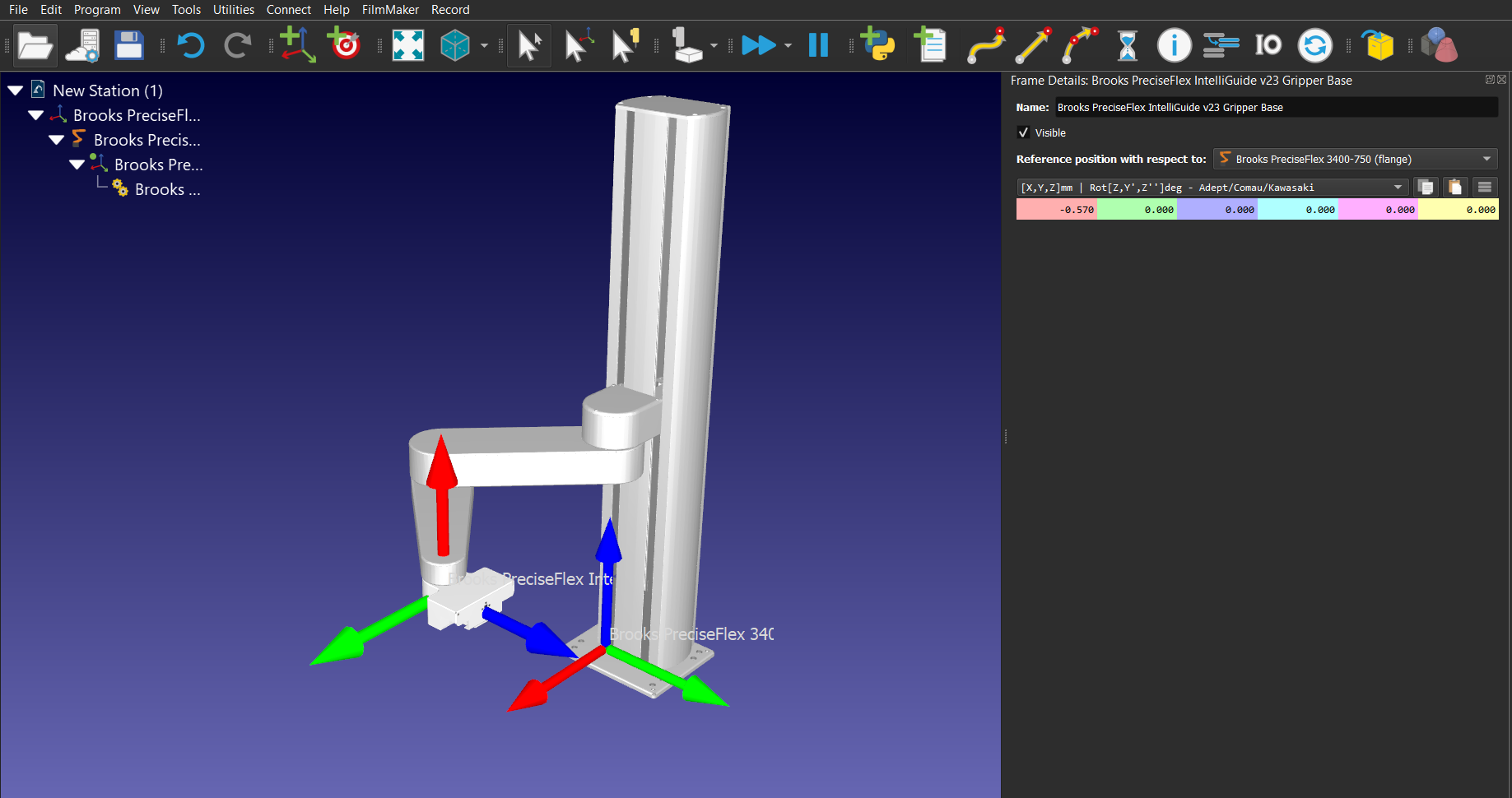
A estrutura de referência de base de cada uma das garras acima é definida de forma exclusiva. Para posicionar corretamente as garras em relação à estrutura de referência do flange dos robôs, as seguintes informações de posição de referência devem ser usadas:
IntelliGuide s23 | IntelliGuide s60 | IntelliGuide s23D | IntelliGuide v23 | IntelliGuide v60 | |
PreciseFlex 400 | [0.603,0,0,0,0,0] | N/A | N/A | [0,0,0,0,0,0] | N/A |
PreciseFlex 3400 | [0.033,0,0,0,0,0] | [0.033,0,0,0,0,0] | [0.033,0,0,0,0,0] | [-0.57,0,0,0,0,0] | [0,0,0,0,0,0] |
PreciseFlex DD 4 eixos | [-70.5,0,0,0,180,180] | [-70.5,0,0,0,180,180] | [-70.5,0,0,0,180,180] | [-71.1,0,0,0,180,180] | [-71.5,0,0,0,180,180] |
PreciseFlex c10 | [-82.5,0,0,0,180,180] | [-82.5,0,0,0,180,180] | [-82.5,0,0,0,180,180] | [-82.5,0,0,0,180,180] | [-82.5,0,0,0,180,180] |
PreciseFlex c3 | [0.313,0,0,0,0,0] | [0.313,0,0,0,0,0] | [0.313,0,0,0,0,0] | [-0.291,0,0,0,0,0] | [0.279,0,0,0,0,0] |
PreciseFlex c3x | [-14.655,0,0,0,0,0] | [-14.655,0,0,0,0,0] | [-14.655,0,0,0,0,0] | [-15.258,0,0,0,0,0] | [-14.688,0,0,0,0,0] |
PreciseFlex c5 | [113,0,0,0,0,0] | [113,0,0,0,0,0] | [113,0,0,0,0,0] | [112.4,0,0,0,0,0] | [113,0,0,0,0,0] |
No que se refere aos robôs Brooks PreciseFlex DD de 4 eixos e c10, o flange IntelliGuide ISO disponível na Biblioteca de robôs deve ser adicionado ao robô para fins de visualização (no caso do robô DD de 4 eixos, a geometria do flange IntelliGuide ISO deve ser movida 9 mm para cima).