Pós-processador
Esta seção explica algumas dicas relacionadas à geração de programas para robôs Brooks.
Ponto central da ferramenta (TCP)
O ponto central da ferramenta (TCP) no RoboDK e o definido no controlador do robô devem corresponder. Se Você estiver usando um mecanismo de pinça, é necessário adicionar um TCP usando "Adicionar Ferramenta (TCP)" que esteja na posição esperada. O novo TCP da ferramenta deve corresponder ao TCP do mecanismo da garra. Para obter informações relacionadas ao ponto central da ferramenta (TCP) dos robôs Brooks PreciseFlex, acesse a interface da Web e siga estas etapas:
1.Admin
2.Setup – Parameter Database
3.Robot
4.Joint/Cartesian control
5.Dynamic Parameters
6.DataID 16051
Gripper
Consulte a seção anterior Simulação do gripper para saber como definir corretamente as instruções do gripper compatíveis com o pós-processador. Essa abordagem define corretamente os locais no projeto GPL, evitando movimentos inesperados do eixo ou eixos da garra.
As garras Brooks PreciseFlex IntelliGuide disponíveis são:
1.Brooks PreciseFlex IntelliGuide s23
2.Brooks PreciseFlex IntelliGuide s60
3.Brooks PreciseFlex IntelliGuide s23D
4.Brooks PreciseFlex IntelliGuide v23
5.Brooks PreciseFlex IntelliGuide v60
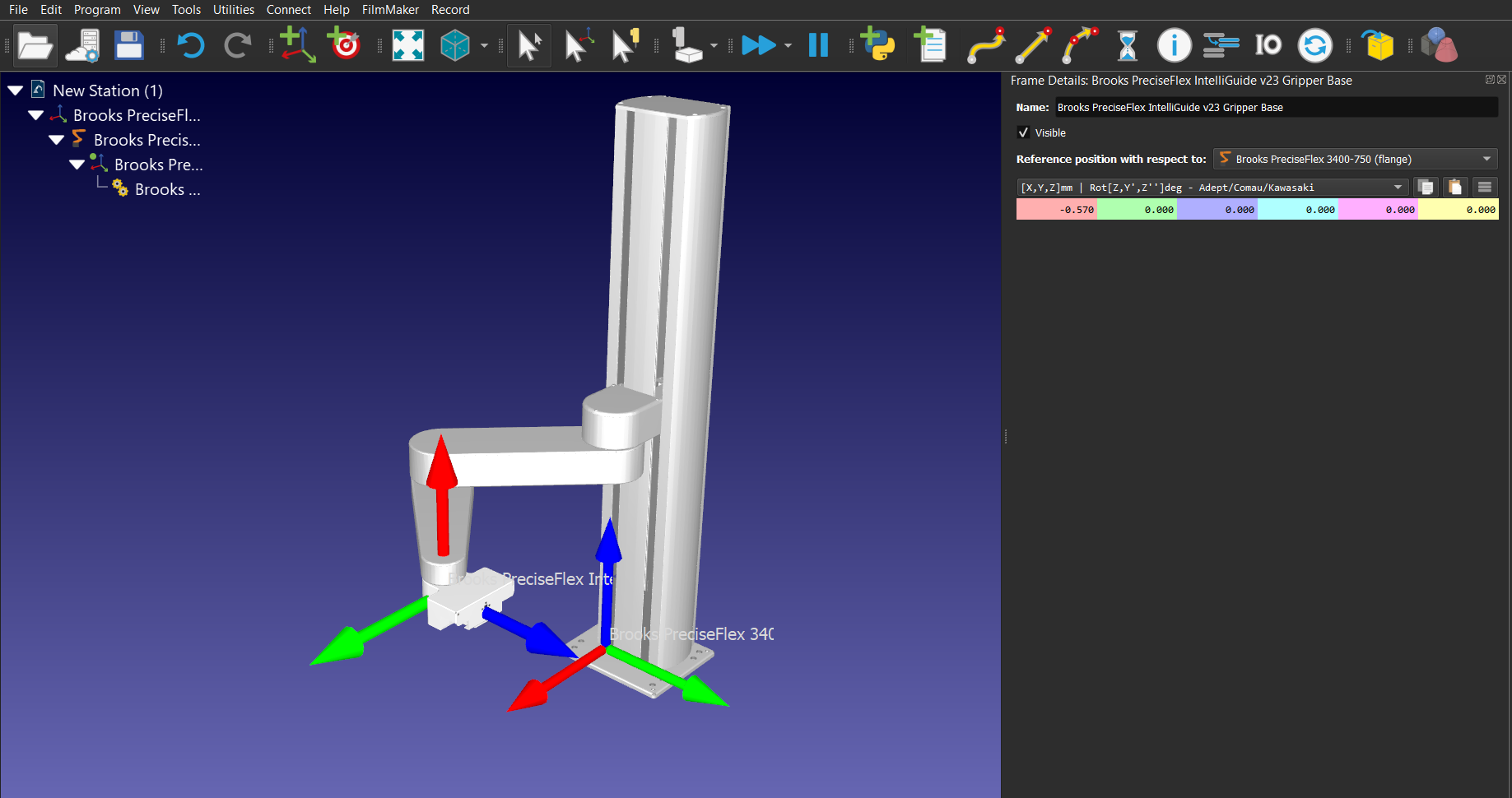
A estrutura de referência de base de cada uma das garras acima é definida de forma exclusiva. Para posicionar corretamente as garras em relação à estrutura de referência do flange dos robôs, as seguintes informações de posição de referência devem ser usadas:
IntelliGuide s23 | IntelliGuide s60 | IntelliGuide s23D | IntelliGuide v23 | IntelliGuide v60 | |
PreciseFlex 400 | [0.603,0,0,0,0,0] | N/A | N/A | [0,0,0,0,0,0] | N/A |
PreciseFlex 3400 | [0.033,0,0,0,0,0] | [0.033,0,0,0,0,0] | [0.033,0,0,0,0,0] | [-0.57,0,0,0,0,0] | [0,0,0,0,0,0] |
PreciseFlex DD 4 eixos | [-70.5,0,0,0,180,180] | [-70.5,0,0,0,180,180] | [-70.5,0,0,0,180,180] | [-71.1,0,0,0,180,180] | [-71.5,0,0,0,180,180] |
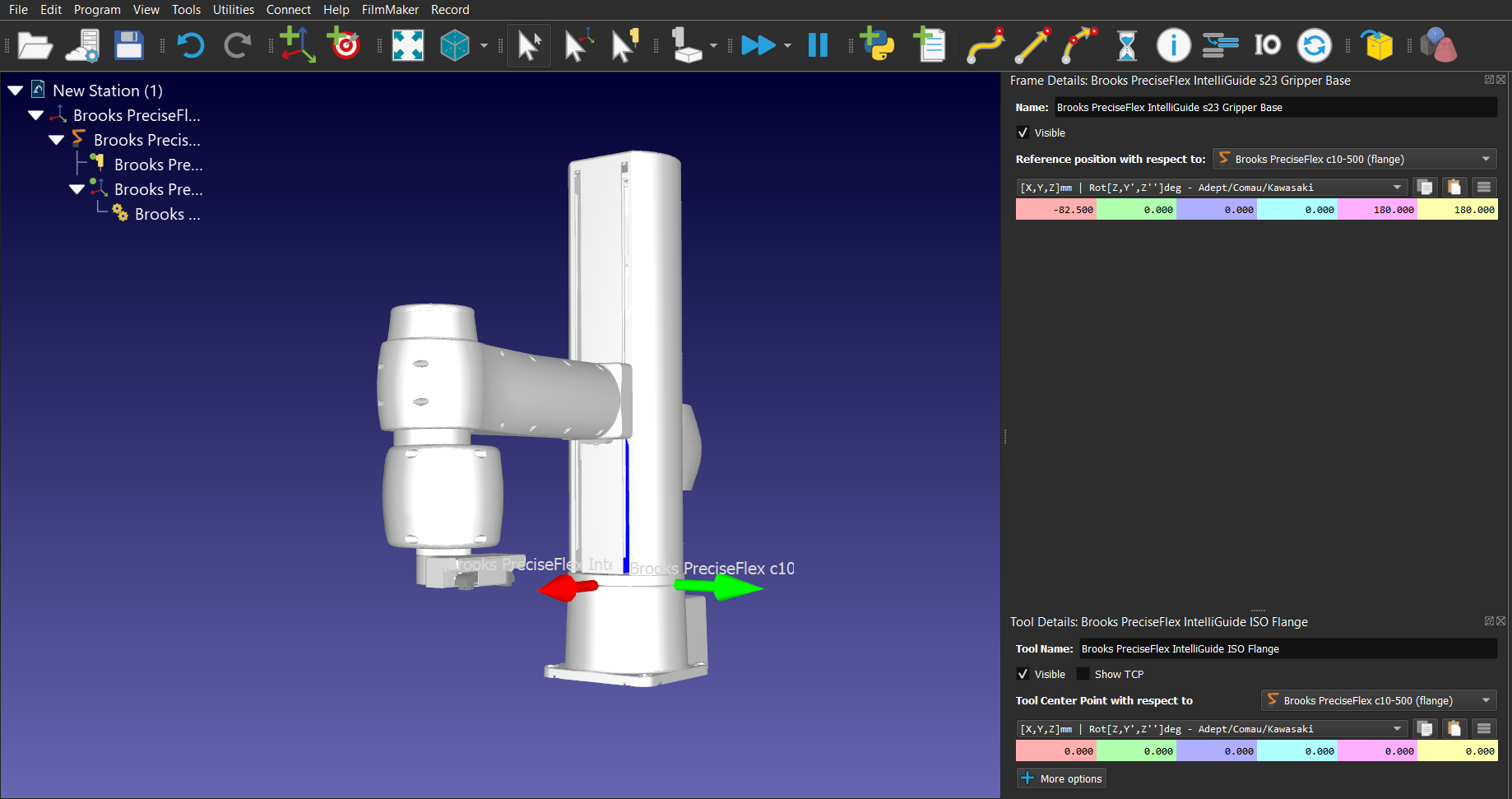
PreciseFlex c10 | [-82.5,0,0,0,180,180] | [-82.5,0,0,0,180,180] | [-82.5,0,0,0,180,180] | [-82.5,0,0,0,180,180] | [-82.5,0,0,0,180,180] |
PreciseFlex c3 | [0.313,0,0,0,0,0] | [0.313,0,0,0,0,0] | [0.313,0,0,0,0,0] | [-0.291,0,0,0,0,0] | [0.279,0,0,0,0,0] |
PreciseFlex c3x | [-14.655,0,0,0,0,0] | [-14.655,0,0,0,0,0] | [-14.655,0,0,0,0,0] | [-15.258,0,0,0,0,0] | [-14.688,0,0,0,0,0] |
PreciseFlex c5 | [113,0,0,0,0,0] | [113,0,0,0,0,0] | [113,0,0,0,0,0] | [112.4,0,0,0,0,0] | [113,0,0,0,0,0] |
No que se refere aos robôs Brooks PreciseFlex DD de 4 eixos e c10, o flange IntelliGuide ISO disponível na Biblioteca de robôs deve ser adicionado ao robô para fins de visualização (no caso do robô DD de 4 eixos, a geometria do flange IntelliGuide ISO deve ser movida 9 mm para cima).
Arredondando
Um valor de entrada de -1 determina que o robô parará no final do movimento e uma restrição de erro de posição rigorosa será aplicada (código GPL: prof1.InRange = 100).
Um valor de entrada de 0 determina que o robô parará no final do movimento, mas uma pequena restrição de erro de posição será aplicada (código GPL: prof1.InRange = 10).
Um valor de entrada maior que 0 determina que o robô não parará no final do movimento e um movimento combinado será executado (código GPL: prof1.InRange = -1).
Velocidade e aceleração
Para obter informações relacionadas às velocidades/acelerações máximas lineares, angulares e das articulações dos robôs Brooks PreciseFlex, acesse a interface da Web e siga estas etapas:
1.Admin
2.Setup – Parameter Database
3.Robot
4.Joint/Cartesian control
5.Dynamic Parameters
6.DataIDs 2700, 2701, 2702, and 2703
O usuário pode definir as entradas das instruções de velocidade/aceleração do RoboDK usando os valores dos DataIDs acima como referências. O pós-processador do Precise usará esses valores para calcular a velocidade/aceleração como porcentagens da velocidade/aceleração máxima de cada robô, conforme solicitado pela classe GPL Profile.
Para alterar os limites usados pelo pós-processador, você pode modificar o pós-processador de acordo com o robô específico que estiver usando. Por padrão, o pós-processador utiliza os limites dos robôs PreciseFlex 400 e PreciseFlex 3400. Consulte a seção https://robodk.com/doc/en/Post-Processors.html#PPEditor da documentação para modificar o pós-processador.
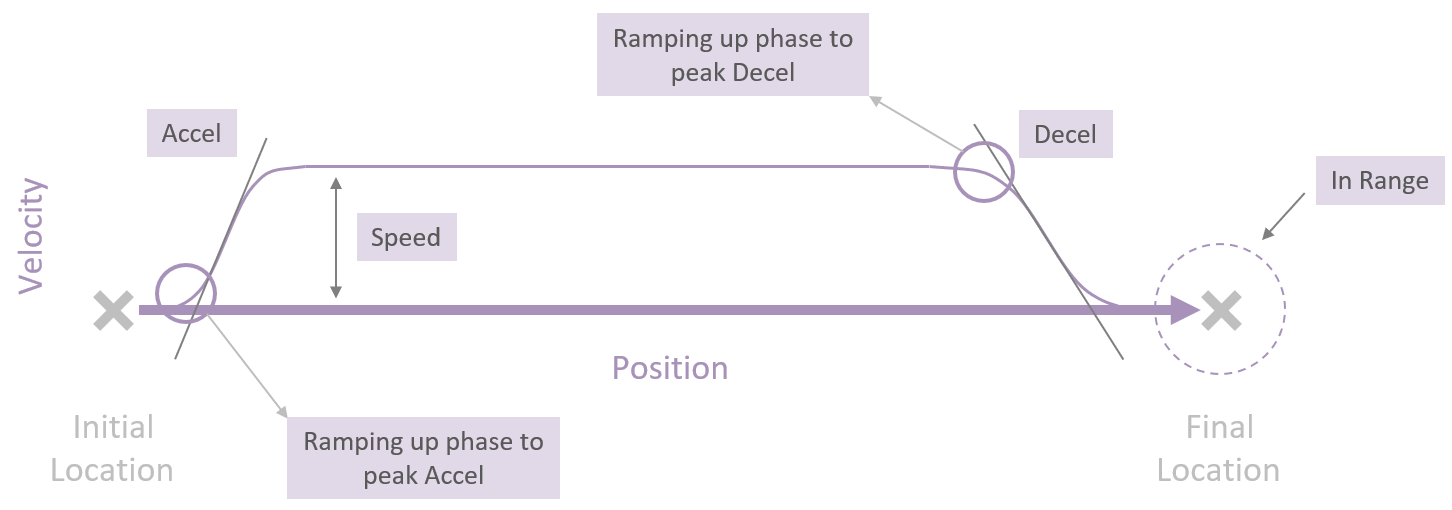
Se os valores de entrada menores que 1 forem usados com instruções de aceleração linear e angular, essas entradas serão usadas como a duração em segundos para a rampa até o pico de aceleração/desaceleração (código GPL: prof1.AccelRamp/prof1.DecelRamp = valor de entrada).
A imagem abaixo fornece mais informações relacionadas aos conceitos descritos acima e como o controlador planeja as trajetórias que o robô deve seguir.
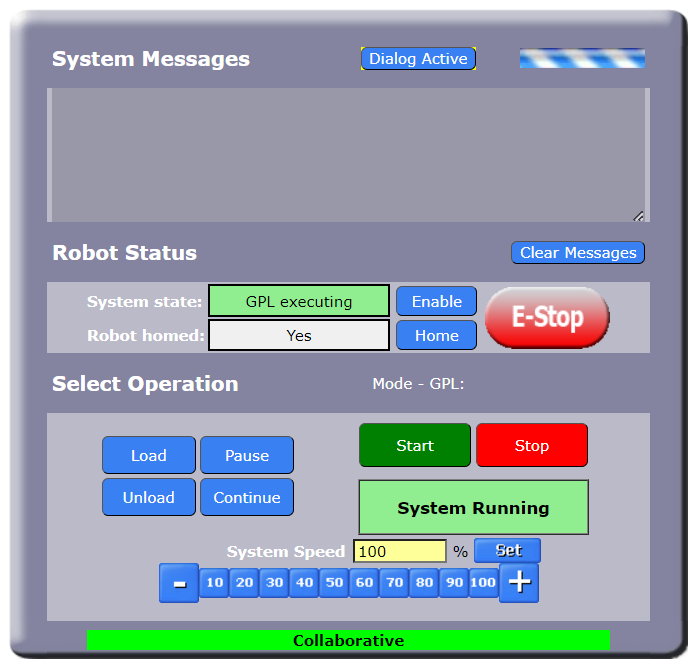
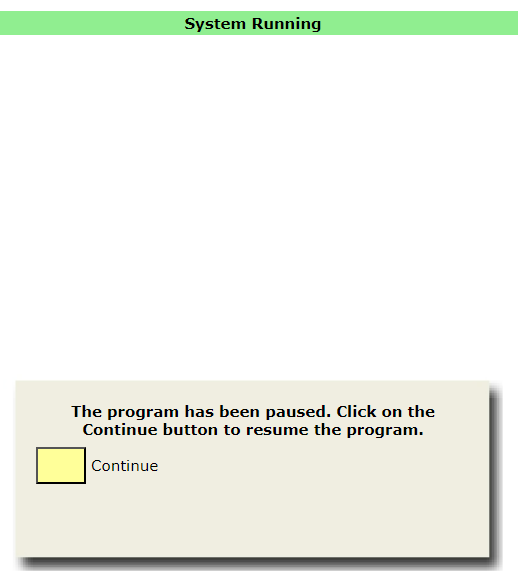
Pausa
A definição de um valor de entrada maior que 0 gerará um comando GPL que pausará o programa durante o tempo definido pelo valor de entrada. Um valor de entrada negativo abrirá uma caixa de diálogo pop-up no painel de controle do operador da interface da Web e o programa será pausado até que o usuário clique no botão "Continue" (Continuar) na caixa de diálogo. Para visualizar a caixa de diálogo, o usuário precisa clicar no botão "Dialog Active" (Diálogo ativo) no Painel de controle do operador.