Trilhos lineares
Como a estrutura de base do robô PreciseFlex não é colocada na base física do robô, são necessários deslocamentos específicos entre os robôs PreciseFlex e os trilhos lineares PreciseFlex.
Trilho Linear Brooks PreciseFlex Configuração de 0 grau:
a.Brooks PreciseFlex 400: [118, 0, 45.6, 0, 0, 0, 0].
b.Brooks PreciseFlex 3400: [118, 0, 62,6, 0, 0, 0, 0].
Trilho Linear Brooks PreciseFlex - Configuração de 90 graus:
a.Brooks PreciseFlex 400: [101,6, 0, 45,6, 0, 0, 0, 0].
b.Brooks PreciseFlex 3400: [101,6, 0, 62,6, 0, 0, 0, 0].
O trilho linear deve ser sincronizado para que o pós-processador leve em conta a posição do eixo. Consulte a seção https://robodk.com/doc/en/General.html#SyncAxes para obter mais informações.
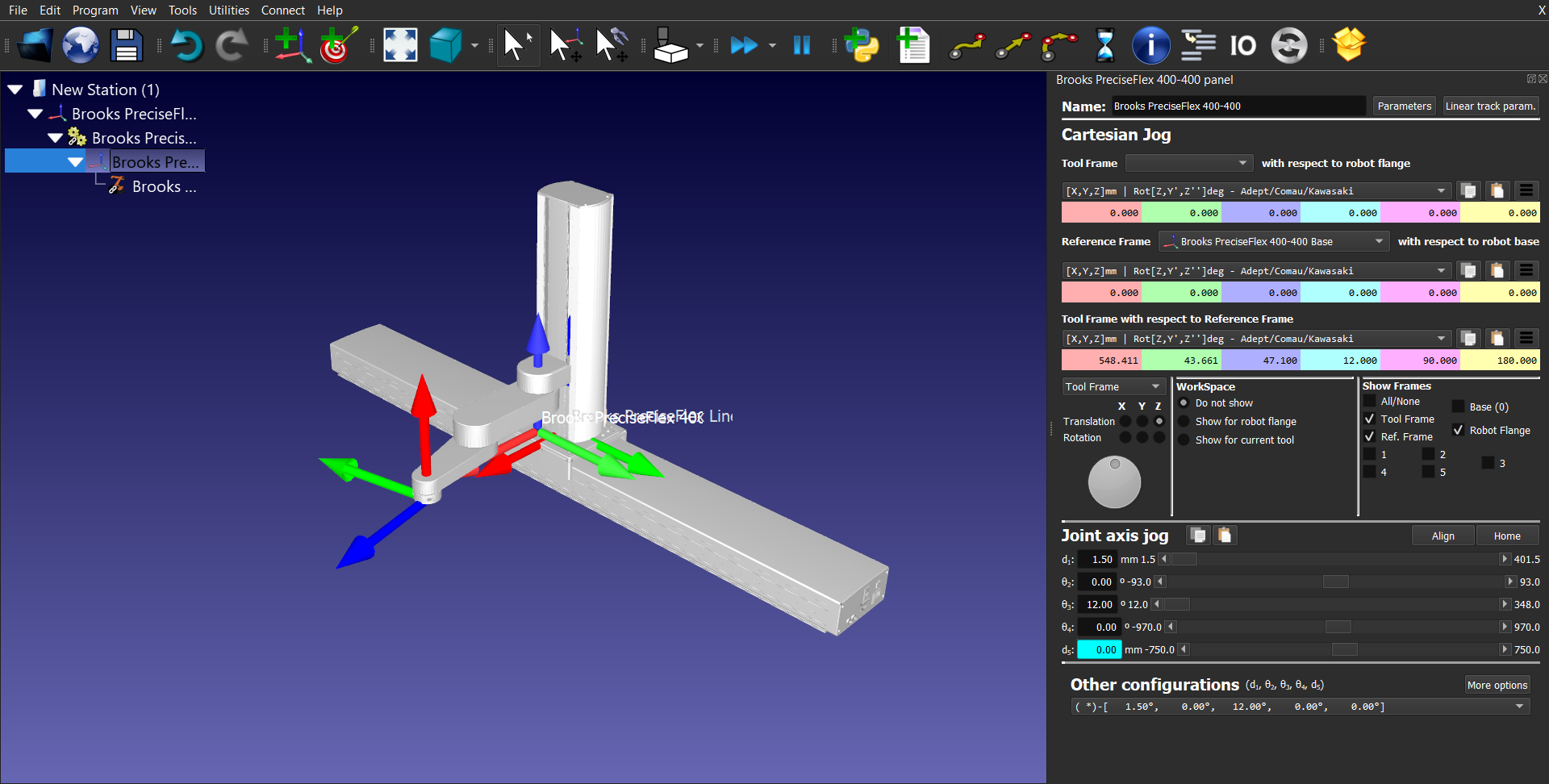
Para salvar corretamente os alvos no frame de referência mundial do robô e usá-los posteriormente em um projeto GPL criado usando o pós-processador, o usuário deve definir um novo frame de referência. Ele deve ser definido com relação ao frame de referência da estação, com os mesmos deslocamentos usados anteriormente entre a base do robô e o trilho linear (conforme relatado acima). Os alvos devem ser definidos com relação a esse frame de referência.
Abaixo está uma imagem que mostra um robô PreciseFlex 400 montado em um trilho linear de 1 m (na configuração de 0 grau) e o frame de referência definido como o Frame de Referência Mundial do robô.
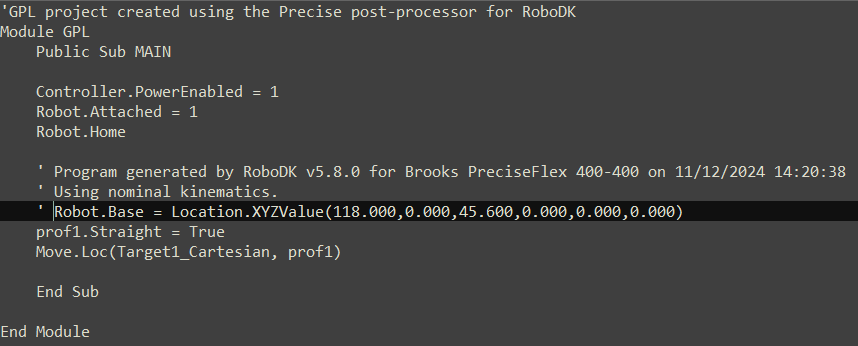
Depois de gerar o projeto GPL, abra o arquivo Main.gpl usando qualquer editor de texto e comente a linha em que a estrutura de referência básica do robô é definida: