Velocidade e aceleração
Para obter informações relacionadas às velocidades/acelerações máximas lineares, angulares e das articulações dos robôs Brooks PreciseFlex, acesse a interface da Web e siga estas etapas:
1.Admin
2.Setup – Parameter Database
3.Robot
4.Joint/Cartesian control
5.Dynamic Parameters
6.DataIDs 2700, 2701, 2702, and 2703
O usuário pode definir as entradas das instruções de velocidade/aceleração do RoboDK usando os valores dos DataIDs acima como referências. O pós-processador do Precise usará esses valores para calcular a velocidade/aceleração como porcentagens da velocidade/aceleração máxima de cada robô, conforme solicitado pela classe GPL Profile.
Para alterar os limites usados pelo pós-processador, você pode modificar o pós-processador de acordo com o robô específico que estiver usando. Por padrão, o pós-processador utiliza os limites dos robôs PreciseFlex 400 e PreciseFlex 3400. Consulte a seção https://robodk.com/doc/en/Post-Processors.html#PPEditor da documentação para modificar o pós-processador.
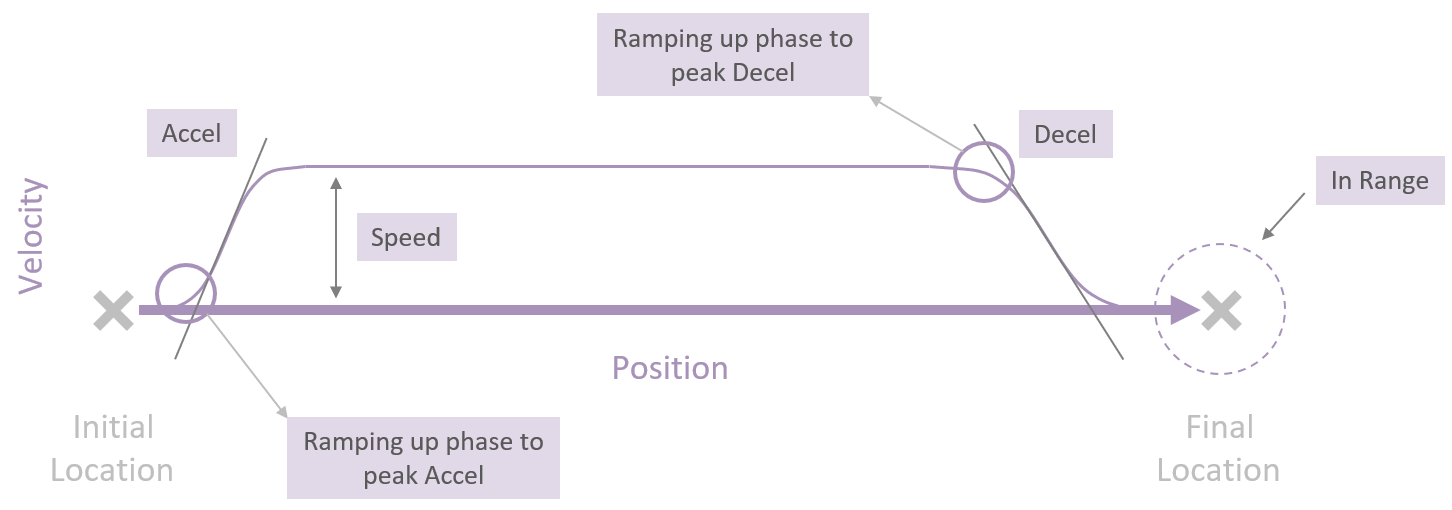
Se os valores de entrada menores que 1 forem usados com instruções de aceleração linear e angular, essas entradas serão usadas como a duração em segundos para a rampa até o pico de aceleração/desaceleração (código GPL: prof1.AccelRamp/prof1.DecelRamp = valor de entrada).
A imagem abaixo fornece mais informações relacionadas aos conceitos descritos acima e como o controlador planeja as trajetórias que o robô deve seguir.