Robôs Comau
Esta seção da documentação fornece uma visão geral das operações típicas quando você usa um robô Comau, como a geração de programas do RoboDK e o carregamento deles no controlador do robô Comau.
Transferir um programa de robô
Esta seção orientará você a carregar um programa no controlador do robô Comau.
Siga estas etapas para carregar um programa via FTP na memória do programa.
1.Na guia de conexão do robô, configure corretamente o endereço IP. Se o nome de usuário e a senha do FTP não forem os valores padrão, é possível configurá-los em "mais opções"
2.Quando você quiser transferir um programa, basta clicar com o botão direito do mouse no programa e selecionar "Enviar ao robô"
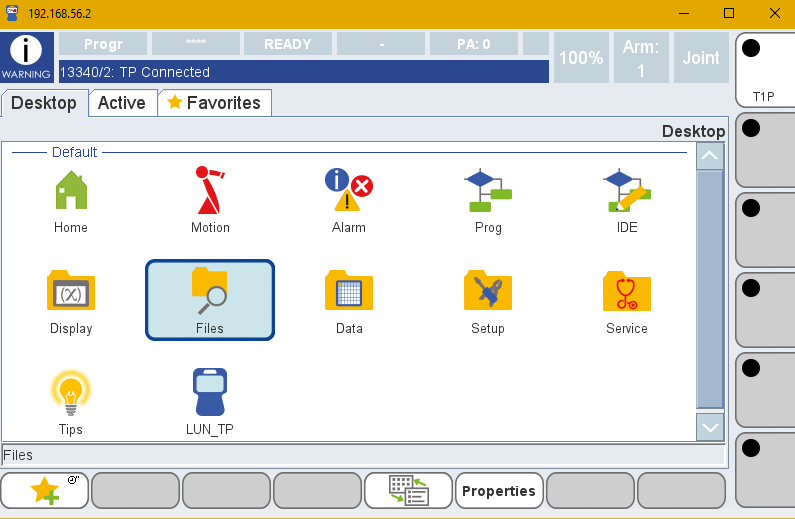
3.No controlador do robô, navegue até "Files" no menu principal dos pingentes de ensino
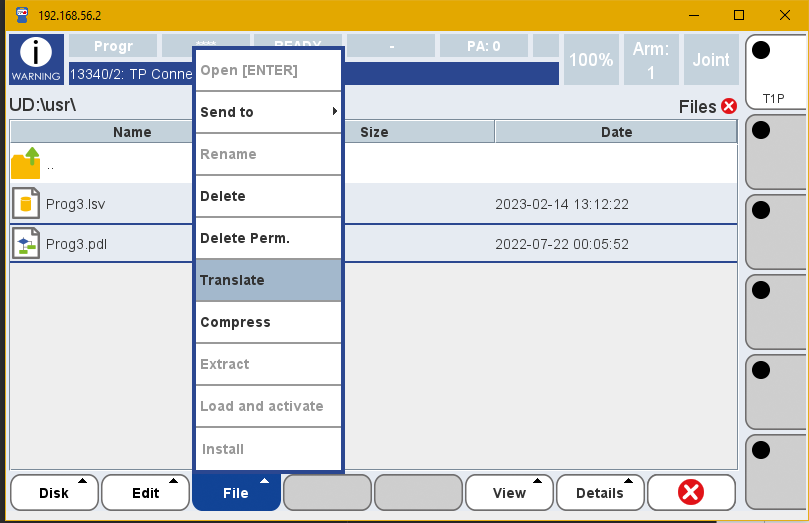
4.Selecione o programa PDL e seu LSV correspondente, se necessário, e clique em File->Translate para converter o programa em sua versão compilada correspondente
5.Os arquivos compilados podem agora ser carregados na memória e executados por meio da opção "Prog" na interface principal
Ao usar o RoboDK com um robô virtual no RoboShop, talvez você queira aumentar o número máximo de conexões FTP simultâneas, caso contrário, o terminal de programação virtual será desconectado sempre que você transferir um arquivo. Você pode conseguir isso abrindo um terminal no robô virtual e executando as seguintes ações.
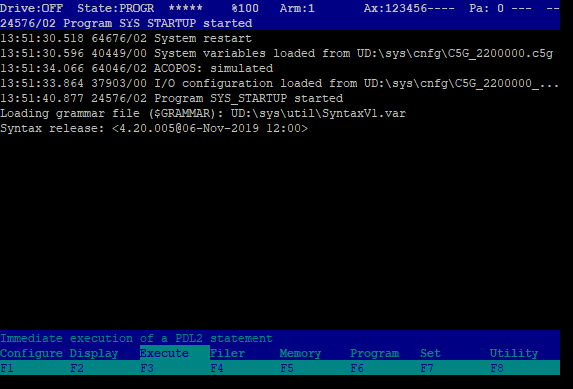
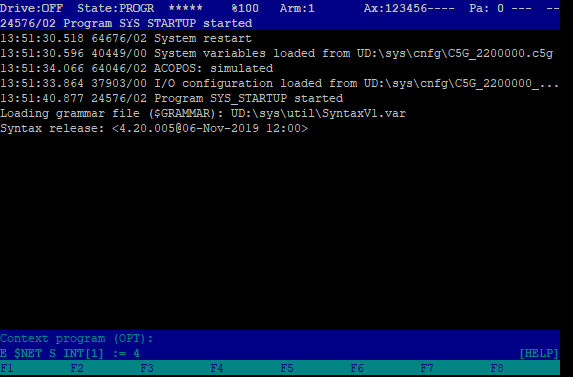
Navegue até o terminal no Roboshop e siga estas etapas dentro do terminal do robô:,
1.Selecione Execute (F3)
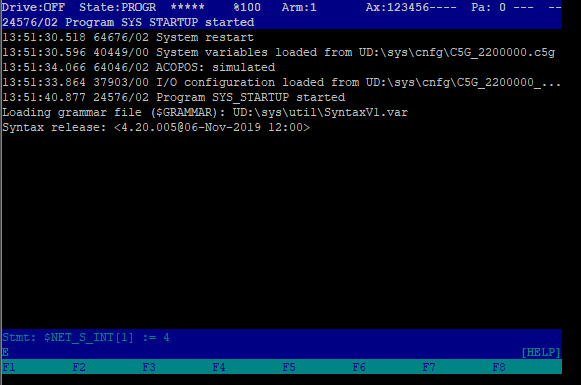
2.Digite "$NET_S_INT[1] := 4"
3.Pressione "Enter" para confirmar a declaração
4.Pressione "Enter" uma segunda vez para executar a declaração.
Pós-processador
Ao gerar programas de robô para os robôs Comau, é importante verificar se o robô está configurado para programas MODAL ou NODAL.
Para programas Nodal, selecione os seguintes pós-processadores clicando com o botão direito do mouse no robô e, em seguida, clicando no botão "Selecionar pós-processador"
●Comau Nodal
Para programas modais, selecione os seguintes pós-processadores clicando com o botão direito do mouse no robô e, em seguida, clicando no botão "Selecionar pós-processador" e, em seguida, escolha um dos seguintes pós-processadores:
●Comau C5G
●Joints Comau C5G
Driver
Você pode usar os recursos de programação on-line com os robôs Comau. Para que os recursos de programação on-line funcionem, você deve configurar o driver no lado do controlador do robô Comau, executando o arquivo de programa PDL do driver.
Você deve seguir estas instruções para configurar o driver Comau para o RoboDK:
1.Transfira o arquivo RoboDKdriver.pdl para o controlador do robô Comau.
2.Iniciar manualmente o programa no robô (converte o robô em um servidor).
3.Conecte-se ao robô pelo RoboDK.
A porta de comunicação usada por padrão é 1102, mas você pode alterá-la no arquivo RoboDKdriver.pdl.