Executar programas a partir do PC
Os programas do robô podem ser executados diretamente do RoboDK para o robô real se uma conexão de rede tiver sido estabelecida.
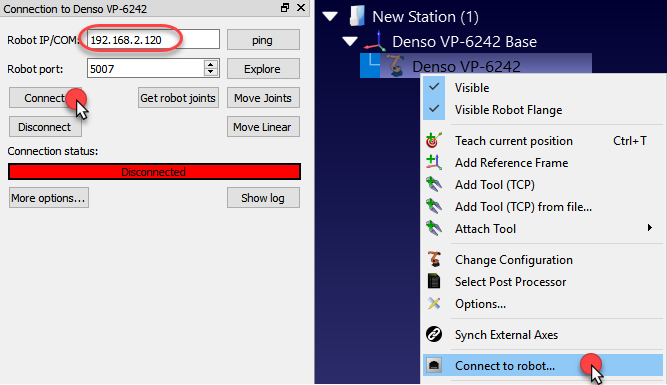
1.Clique com o botão direito do mouse no robô no RoboDK
2.Selecione: 
3.Digite o IP do robô
4.Selecione Conectar.
Deve haver uma mensagem verde exibindo Pronto se a conexão for bem-sucedida.
O robô pode ser movido selecionando Obter eixos do robô, Mover eixos e Mover linear no menu de conexão.
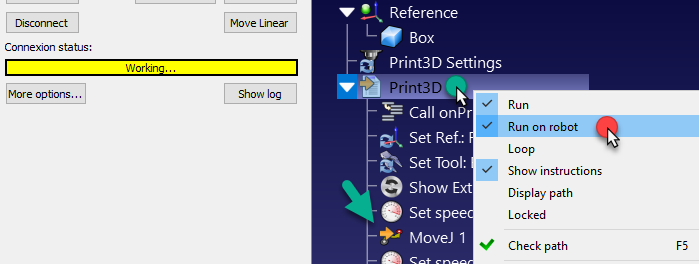
Use a opção Executar no robô para mover o robô enquanto mantém o feedback no RoboDK (Programação on-line). Esse método usa o robô como um servidor e cada instrução é enviada ao robô passo a passo à medida que é executada no simulador. Esse método é útil para fins de depuração.
1.Clique com o botão direito do mouse no programa (Print3D, conforme mostrado na imagem a seguir)
2.Selecione Executar no robô
3.Clique duas vezes no programa para iniciá-lo (ou clique com o botão direito do mouse e selecione Executar)
Quando essa opção estiver marcada, ela se conectará ao robô real sempre que clicarmos duas vezes em um programa (ou clicarmos com o botão direito do mouse e selecionarmos Executar)
Essas operações também estão disponíveis na API do RoboDK e permitem a integração da programação do robô com outros aplicativos. A API está disponível em Python, C# e outras linguagens de programação.