Robôs Denso
O RoboDK suporta as linguagens de programação PAC e PacScript usadas pelos robôs Denso para programação off-line. Basta selecionar o pós-processador correspondente e gerar o programa do robô
●PAC (controladores RC7 e anteriores)
●PacScript (RC8 e controladores mais recentes)
Além disso, o RoboDK também suporta a programação on-line dos controladores RC7 e RC8 da Denso. Isso é possível com o driver padrão do RoboDK para a Denso. Versões mais antigas ou mais recentes também podem ser parcialmente suportadas.
Este documento fornece principalmente informações relacionadas a como usar os recursos de programação on-line nos controladores de robôs Denso.
Os drivers de robô oferecem uma alternativa à programação off-line (em que um programa é gerado e, em seguida, transferido para o robô e executado). Com os drivers de robô, é possível executar uma simulação diretamente no robô (Programação on-line). Mais informações estão disponíveis na seção Robot Drivers.
Como habilitar o servidor b-Cap
O servidor b-Cap deve estar habilitado para usar o driver de robô da Denso (programação on-line).
Siga estas etapas para ativar o servidor b-Cap no lado do robô:
1.Coloque o controlador do robô no modo manual.
2.Selecione Option and Input password 1214 e ative a opção ORiN
3.Permissão de comunicação Ethernet: Menu de configuração de comunicações - Permissão - Definir leitura/gravação
4.Defina o token executável do controlador como Ethernet no menu de configuração de comunicações. Isso permite iniciar programas a partir do computador.
Executar programas a partir do PC
Os programas do robô podem ser executados diretamente do RoboDK para o robô real se uma conexão de rede tiver sido estabelecida.
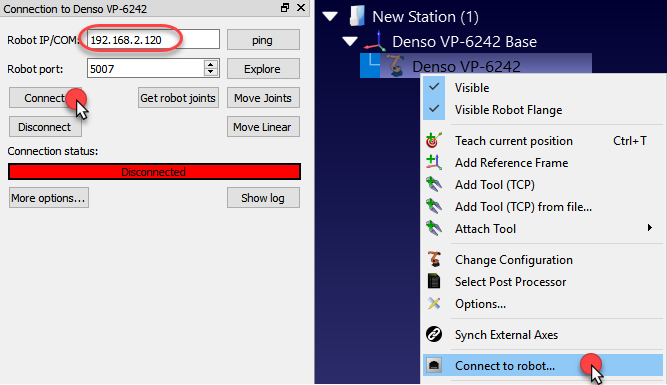
1.Clique com o botão direito do mouse no robô no RoboDK
2.Selecione: 
3.Digite o IP do robô
4.Selecione Conectar.
Deve haver uma mensagem verde exibindo Pronto se a conexão for bem-sucedida.
O robô pode ser movido selecionando Obter eixos do robô, Mover eixos e Mover linear no menu de conexão.
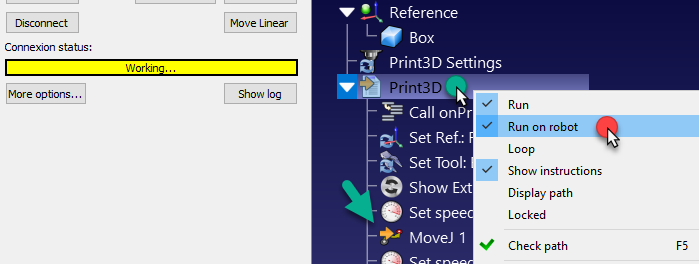
Use a opção Executar no robô para mover o robô enquanto mantém o feedback no RoboDK (Programação on-line). Esse método usa o robô como um servidor e cada instrução é enviada ao robô passo a passo à medida que é executada no simulador. Esse método é útil para fins de depuração.
1.Clique com o botão direito do mouse no programa (Print3D, conforme mostrado na imagem a seguir)
2.Selecione Executar no robô
3.Clique duas vezes no programa para iniciá-lo (ou clique com o botão direito do mouse e selecione Executar)
Quando essa opção estiver marcada, ela se conectará ao robô real sempre que clicarmos duas vezes em um programa (ou clicarmos com o botão direito do mouse e selecionarmos Executar)
Essas operações também estão disponíveis na API do RoboDK e permitem a integração da programação do robô com outros aplicativos. A API está disponível em Python, C# e outras linguagens de programação.
Driver RoboDK para Denso
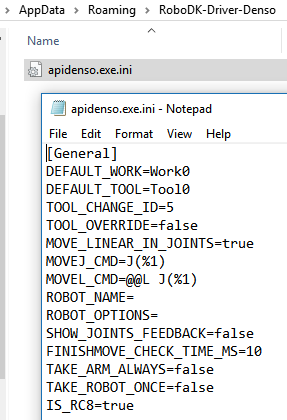
O driver do RoboDK para a Denso pode ser altamente personalizado para obter um comportamento específico. Essa personalização pode ser feita editando o arquivo ini localizado em:
%APPDATA%/RoboDK-Driver-Denso/apidenso.exe.ini
Essas personalizações permitem especificar o tipo de movimentos ou a possibilidade de acionar mais de um robô ao mesmo tempo. Qualquer editor de texto pode ser usado para modificar esse arquivo.
As seguintes variáveis podem ser configuradas:
●DEFAULT_WORK - Objeto de trabalho usado por padrão (string variável).
●DEFAULT_TOOL - Variável de ferramenta usada por padrão.
●TOOL_CHANGE_ID - Variável de ferramenta de reserva a ser usada quando definirmos uma nova ferramenta (5=Tool5, por exemplo).
●MOVE_LINEAR_IN_JOINTS - Defina como false para fornecer movimentos lineares como pontos cartesianos.
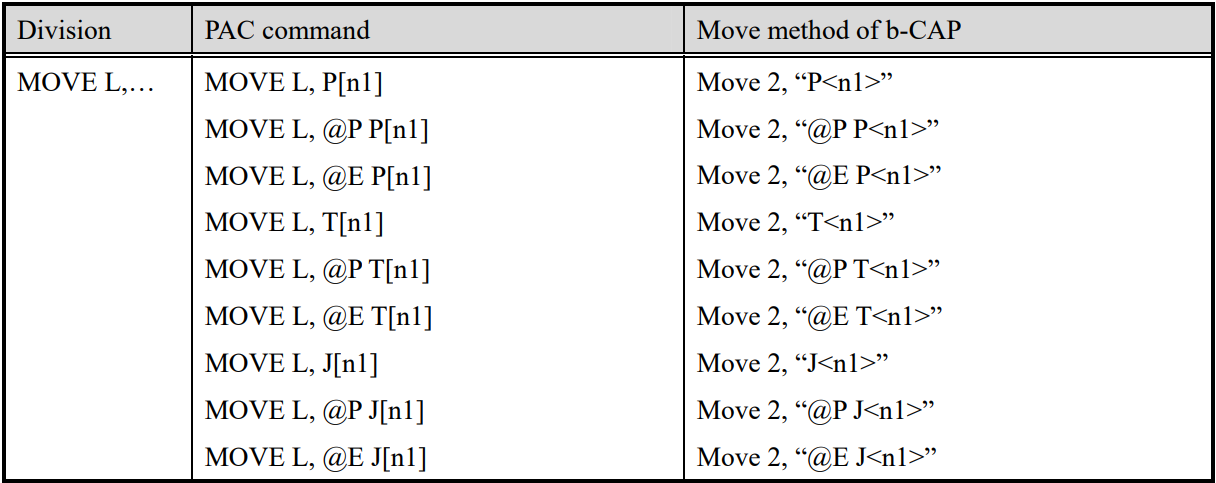
●MOVEJ_CMD - Comando a ser enviado para um movimento conjunto (MoveJ). A tabela a seguir fornece as opções permitidas.
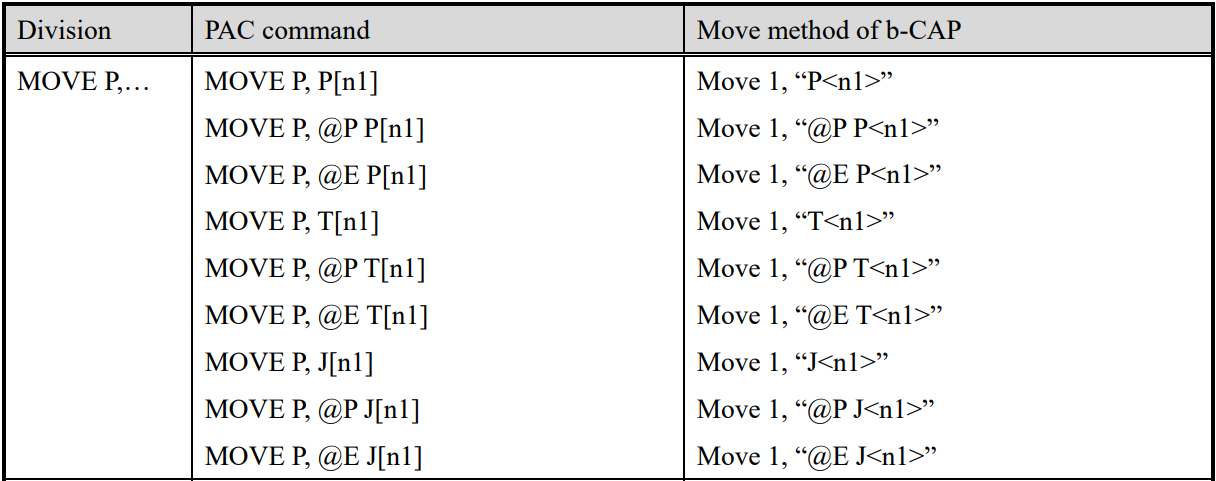
●MOVEL_CMD - Comando a ser enviado para um movimento linear (MoveL). A tabela a seguir fornece as opções permitidas.
●ROBOT_NAME - Nome do robô. Especifique esse nome para selecionar um robô específico de um controlador
●ROBOT_OPTIONS - Opções do robô para obter os recursos do robô. Por exemplo, se estivermos usando o robô escravo do controlador, devemos especificar ROBOT_OPTIONS="ID=1". A ID deve ser 0 (padrão) se quisermos usar o robô mestre (robô principal).
●SHOW_JOINTS_FEEDBACK - Defina como true para ver o feedback do robô na tela em tempo real (o desempenho pode ser mais lento).
●FINISH_MOVE_CHECK_MS - Define a velocidade com que a posição do robô deve ser atualizada na tela ao mostrar o feedback das articulações.
●TAKE_ARMS_ALWAYS - Defina como true para manter os recursos do controlador após cada movimento até que o robô seja desconectado (mais rápido, mas pode levar a resultados inesperados).
●TAKE_ROBOT_ONCE - Defina como true para manter o recurso do robô após cada movimento enquanto o robô estiver conectado (mais rápido, mas pode levar a resultados inesperados).
●IS_RC8 - Defina como false para se conectar corretamente ao RC7 e aos controladores Denso mais antigos.