Atualização dos parâmetros cinemáticos do controlador
Esta seção explica como Você pode atualizar os parâmetros cinemáticos (tabela DH) no controlador do robô depois de calibrar o robô usando o pacote de Calibração e Desempenho do RoboDK.
A modificação dos parâmetros DH do controlador afetará todos os programas criados manualmente no controlador. Mantenha uma cópia dos parâmetros DH originais, caso você queira voltar às configurações de fábrica do controlador.
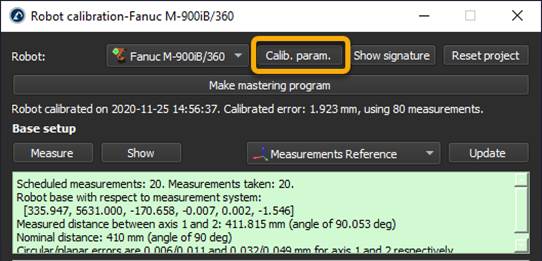
1.Na janela de calibração, abra os Parâmetros de calibração.
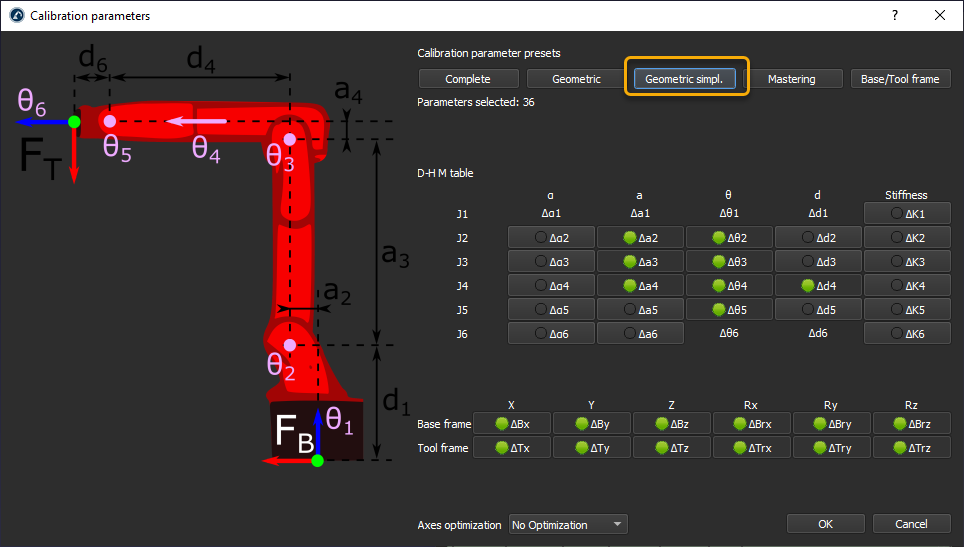
2.Selecione Geometric simplified (Geométrico simplificado).
3.Executar uma sequência de calibração ou atualizar uma já existente.

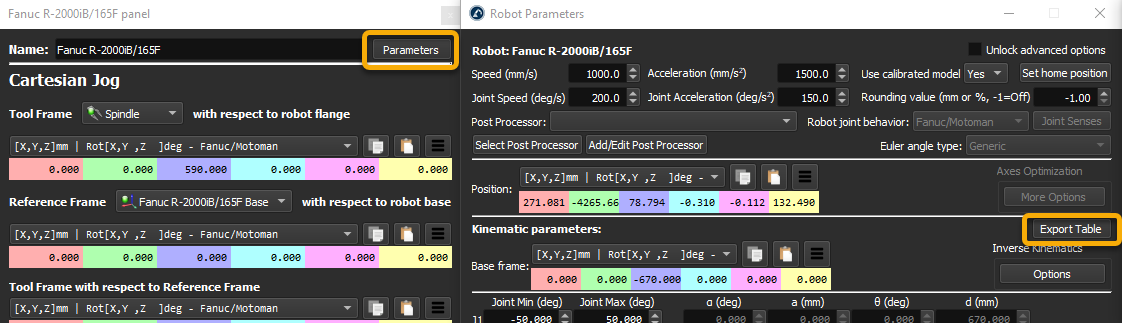
4.Recupere os parâmetros DH calibrados do robô. No painel Robô, selecione Parâmetros. Em seguida, selecione Exportar tabela.
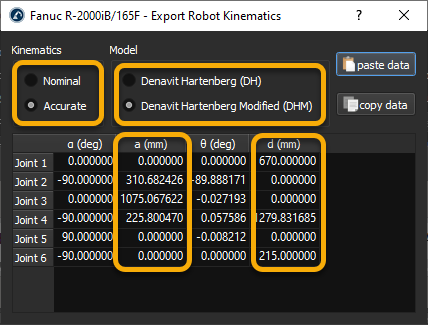
5.Certifique-se de usar a cinemática Accurate. O Nominal pode ser usado para comparar com os parâmetros DH padrão do controlador.
6.Use o modelo Danavit Hartenberg Modified para modificar os parâmetros do controlador.
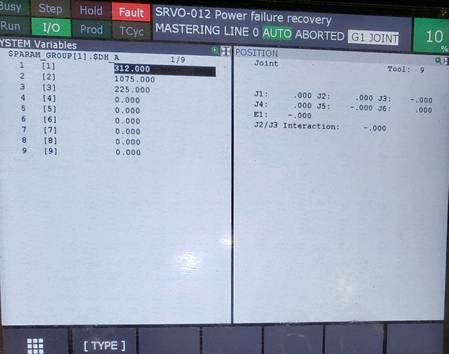
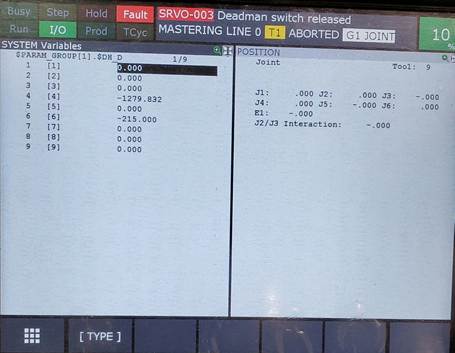
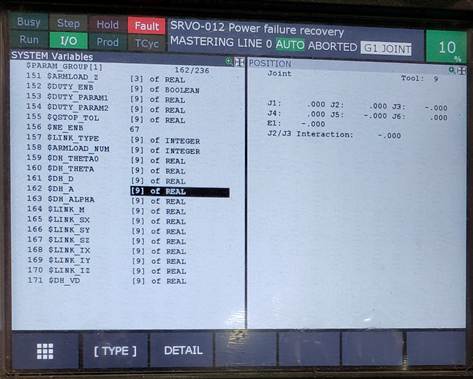
7.No terminal de programação do robô, abra as variáveis do sistema -> $PARAM_GROUP[1].
8.Encontre os parâmetros $DH_A e $DH_D.
9.Modifique os valores DH com os valores a e d da janela Exportar cinemática do robô.