Compilação de programas (LS vs. TP)
Esta seção explica a diferença entre os arquivos de programa Fanuc LS e TP e como compilar automaticamente os programas para os robôs Fanuc usando o RoboDK.
É necessário um arquivo binário para executar programas de robô em robôs Fanuc (TP, também conhecido como TPP). Os programas para robôs Fanuc gerados por software de programação off-line (como o RoboDK) estão no formato LS (ASCII, legível por texto e não compilado). Há duas opções para converter programas de robôs LS em programas TP:
1.Ter a opção de software ASCII Upload no robô. É possível que essa opção já esteja disponível no robô. A melhor maneira de verificar se essa opção está disponível é fornecer um arquivo LS ao robô e ele deverá ser automaticamente convertido em um arquivo TP. Por exemplo, coloque o arquivo no disco FR e selecione LOAD no terminal de programação.
2.Compilar o programa usando as ferramentas WinOLPC do Roboguide. Nesse caso, o mesmo computador em que o RoboDK está instalado pode compilar o programa LS automaticamente usando a ferramenta de compilação "maketp.exe" da Fanuc. Esse comando requer um arquivo " robot.ini ". Esse arquivo pode ser gerado com o utilitário setrobot.exe do WinOLPC se o Roboguide estiver instalado e uma estação de trabalho tiver sido salva no computador ("Work Cell").
Se Você tiver as ferramentas do Roboguide WinOLPC instaladas no local padrão, o RoboDK automaticamente os programas TP logo após a geração de um programa LS.
Certifique-se de que você tenha selecionado um robô usando o arquivo executável setrobot. Se o arquivo TP não for gerado e você tiver o Roboguide WinOLPC instalado, talvez seja necessário seguir estas etapas:
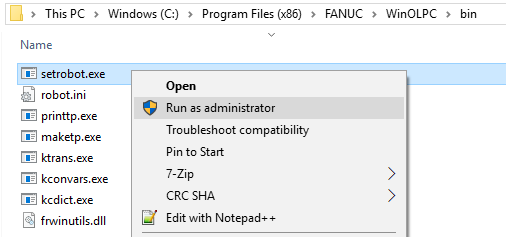
1.Abra o Windows Explorer e navegue até a pasta de instalação do WinOLPC:
C:\ Program Files (x86)\FANUC\WinOLPC\bin
2.Clique com o botão direito do mouse no arquivo setrobot.exe e selecione Executar como administrador
3.Selecione a Work Cell do robô (é necessário um Roboguide WorkCell)
Como alternativa, o conteúdo da pasta a seguir pode ser copiado da pasta padrão:
C:\Program Files (x86)\FANUC\WinOLPC\bin
para a pasta:
C:\RoboDK\api\Fanuc
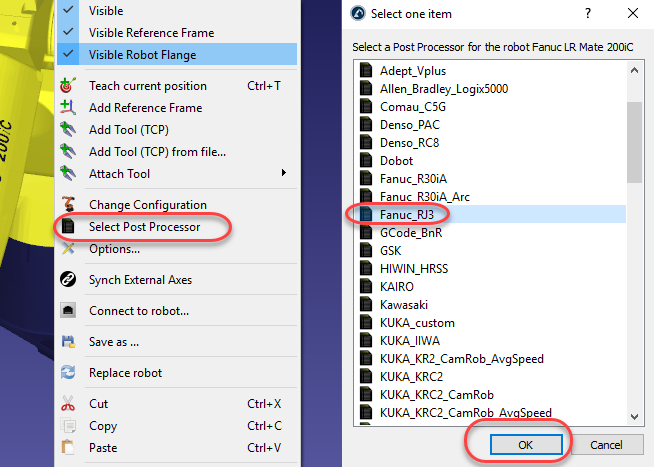
Siga estas etapas para selecionar um pós-processador compatível com os controladores Fanuc RJ3:
1.Clique com o botão direito do mouse no robô
2.Selecione Select Post Processor
3.Selecione Fanuc RJ3
4.Gerar seu programa (F6)
Siga estas etapas se você não instalou o Roboguide WinOLPC no local padrão e deseja obter um arquivo TP automaticamente quando gerar um programa a partir do RoboDK:
1.Selecione Programa ➔ Adicionar/Editar Pós-processador
2.Selecione Fanuc RJ3 (ou o pós-processador que você gostaria de usar). Todos os pós-processadores também podem ser acessados por meio da pasta: C:/RoboDK/Posts/. Além disso, verifique se você não está usando um pós-processador compilado.
3.Localize a variável PATH_MAKE_TP (por volta da linha 103) e digite o caminho em que o executável maketp está localizado.
Os pós-processadores RoboDK para robôs Fanuc suportam o uso de robôs de 6 eixos sincronizados com eixos externos, como plataformas giratórias ou eixos lineares.