Configuração do driver
Você pode definir configurações adicionais do driver usando o arquivo INI. Isso permite que você configure como mapear os eixos externos.
Quando Você executar o driver pela primeira vez, ele gerará um arquivo contendo sinalizadores para a configuração de parâmetros avançados do driver, como o mapeamento de eixos externos. O local desse arquivo de configurações pode ser encontrado no início do registro do driver, na linha que começa com Loading settings.
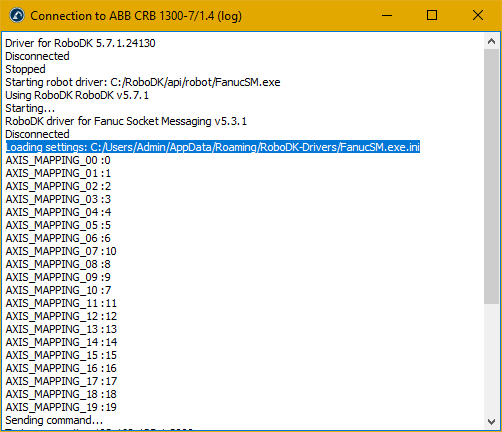
Você pode abrir esse arquivo com qualquer editor de texto e encontrará uma lista de eixos usados pelo RoboDK e os eixos correspondentes no lado do controlador do robô Fanuc. Além disso, você pode ativar a impressão de depuração extra e alterar o número de grupos de movimento que serão usados.
Se, por exemplo, o eixo 8 no RoboDK corresponder ao eixo 9 no controlador do robô, basta alterar o número do lado direito para o valor correto. O mapeamento configurado pode ser visto na mensagem de inicialização abaixo da mensagem Loading settings (Carregando configurações).
Os eixos 0-9 são do grupo de movimento 1 e os eixos 10-17 são do grupo de movimento 2; portanto, se o eixo externo estiver no segundo grupo de movimento, ele corresponderá aos eixos 10 no arquivo de configuração.