Driver RoboDK para Fanuc
Você pode estabelecer uma conexão entre o RoboDK e o controlador do robô Fanuc para mover o robô automaticamente a partir de um PC conectado usando o RoboDK.
Isso permite que você use a opção RoboDK Executar no Robô para programação e depuração on-line. A conexão pode ser estabelecida por meio de uma conexão Ethernet padrão (TCP/IP).
Os drivers de robô oferecem uma alternativa à programação off-line (em que um programa é gerado e, em seguida, transferido para o robô e executado). Com os drivers de robô, é possível executar uma simulação diretamente no robô (Programação on-line). Mais informações estão disponíveis na seção Robot Drivers.
Siga estas etapas para configurar o driver do RoboDK para o Fanuc:
1.Faça o download dos arquivos do programa do driver Fanuc da área do cliente e transfira os seguintes programas do robô para o controlador do robô Fanuc:
a.RDK_S3.PC➔ Este é o programa principal que gerencia a comunicação por meio do S3 (porta de comunicação do soquete número 3 - S3). Certifique-se de selecionar a versão correta (os controladores de robôs Fanuc mais recentes exigem o uso da versão na pasta V9).
b.GO_MJ.TP
c.GO_ML.TP
d.GO_MC.TP
e.GO_PROG.TP
Siga estas etapas no terminal de programação do robô para preparar a comunicação entre o robô Fanuc e o RoboDK:
1.Selecione Menu-(Next)-System-[TYPE]-Variables.
a.Selecione $HOSTS_CFG (manter a tecla shift pressionada enquanto seleciona o ajudará a rolar a tela para baixo mais rapidamente)
b.Selecione o número 3
c.Defina $SERVER_PORT como 2000
($HOSTS_CFG[3].$SERVER_PORT = 2000)
2.Selecione Menu-Setup
3.Selecione [TYPE]-Host comm
4.Selecione [SHOW]-Servers
5.Selecione "S3"-Enter.
a.Definir o nome do protocolo como SM
b.Em Port Name (Nome da porta), se houver várias portas disponíveis: Defina Port como P3 (ou a porta correspondente).
c.Definir o tempo limite de inatividade como 9999
d.Definir o estado de inicialização como [CHOICE] START
e.Definir o estado atual como STARTED:
Para fazer isso, selecione [ACTION]-DEFINE e, em seguida, [ACTION]-START
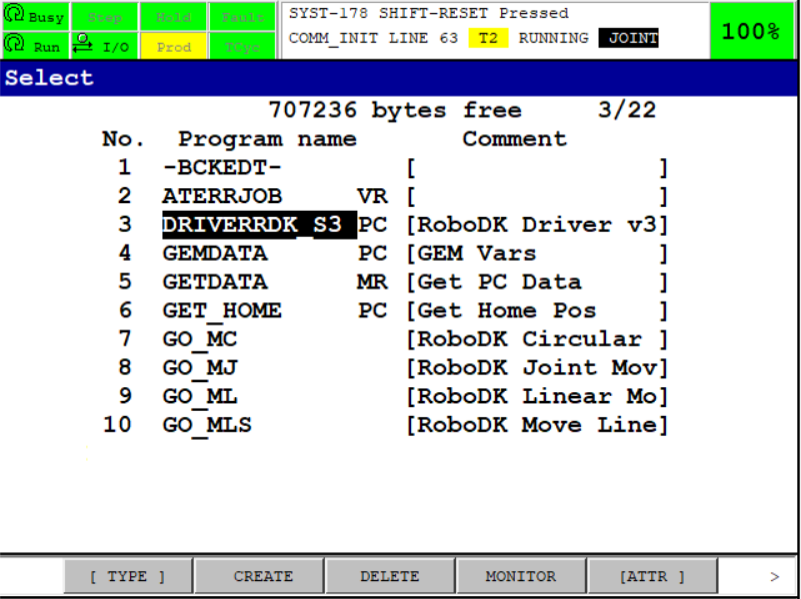
6.Inicie o programa RDK_S3:
a.Selecione o botão SELECT no terminal de programação.
b.Role a tela para baixo até o programa RDK_S3
c.Selecione Enter (botão do terminal de programação)
d.Selecione Shift-Reset e Shift-Forward para iniciar o programa
Você deverá ver a mensagem RUNNING (Executando) no pendente de aprendizagem. Se o programa não for executado, é provável que você não tenha uma opção de robô (interface de PC ou User Socket Messaging) ou não tenha obtido a versão correta do programa de PC.
7.No RoboDK, forneça o IP do robô e selecione Connect para se conectar ao robô.
Configuração do driver
Você pode definir configurações adicionais do driver usando o arquivo INI. Isso permite que você configure como mapear os eixos externos.
Quando Você executar o driver pela primeira vez, ele gerará um arquivo contendo sinalizadores para a configuração de parâmetros avançados do driver, como o mapeamento de eixos externos. O local desse arquivo de configurações pode ser encontrado no início do registro do driver, na linha que começa com Loading settings.
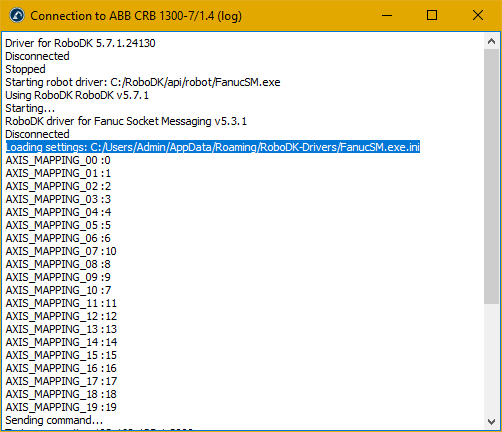
Você pode abrir esse arquivo com qualquer editor de texto e encontrará uma lista de eixos usados pelo RoboDK e os eixos correspondentes no lado do controlador do robô Fanuc. Além disso, você pode ativar a impressão de depuração extra e alterar o número de grupos de movimento que serão usados.
Se, por exemplo, o eixo 8 no RoboDK corresponder ao eixo 9 no controlador do robô, basta alterar o número do lado direito para o valor correto. O mapeamento configurado pode ser visto na mensagem de inicialização abaixo da mensagem Loading settings (Carregando configurações).
Os eixos 0-9 são do grupo de movimento 1 e os eixos 10-17 são do grupo de movimento 2; portanto, se o eixo externo estiver no segundo grupo de movimento, ele corresponderá aos eixos 10 no arquivo de configuração.