Obtenha as posições de eixos do robô
Siga estas etapas no terminal de programação Fanuc para obter as posições de eixos do robô de seu robô real.
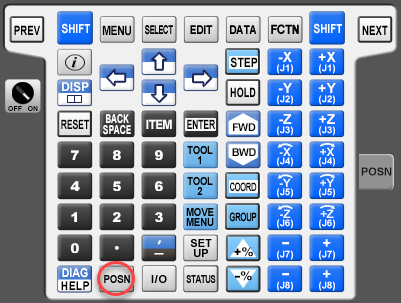
1.Selecione POSN (botão no terminal de programação) para ver a posição atual do robô
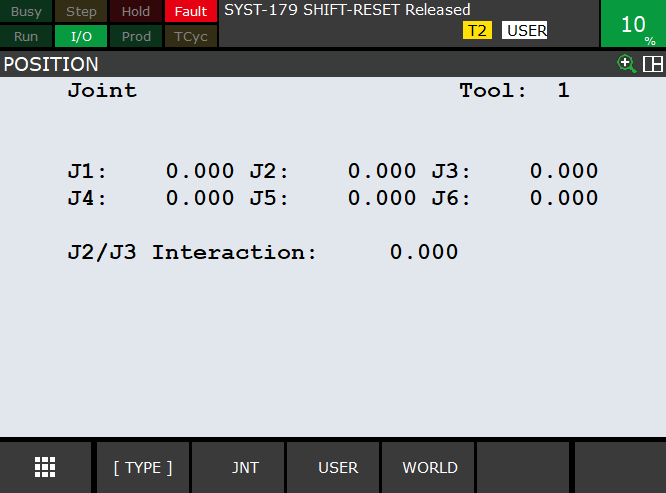
2.Selecione JNT na tela ou selecione COORD (botão no terminal de programação) para selecionar o modo de junções.