Transferir um programa de robô
É necessário seguir estas etapas para carregar um programa a partir de uma unidade USB:
1.Conecte a unidade USB no pingente de ensino
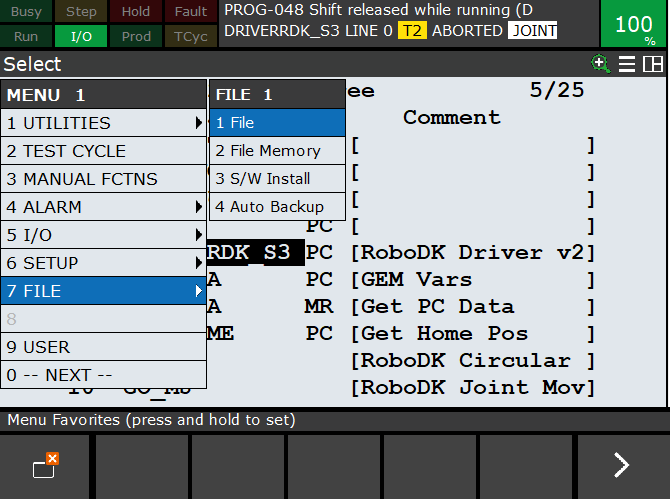
2.Selecione Menu➔ File
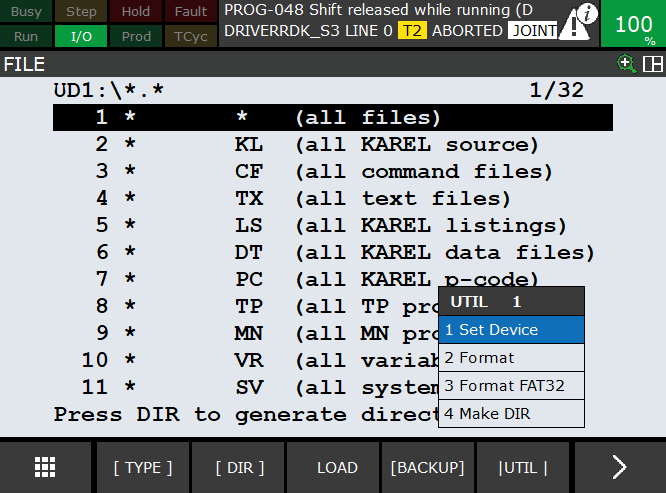
3.Selecione Utilities➔ Set device➔ USB
4.Selecione DIR
5.Selecione o arquivo de programa TP ou LS no disco USB (BALLBARTEST.TP, por exemplo)
Isso salvará automaticamente o arquivo na memória FR do controlador
6.Selecione o programa na memória FR e selecione LOAD (botão de tela)
Importante: a opção ASCII Upload é necessária para a programação off-line. Isso permite carregar arquivos LS diretamente no controlador. Alternativamente, os programas LS (arquivos ASCII) podem ser compilados em programas TP (arquivos binários) a partir do PC usando as ferramentas WinOLPC da Fanuc (MakeTP).
Importante: A velocidade linear dos programas criados com o RoboDK é definida pelo registro R[10] por padrão. Se a velocidade não estiver definida no programa, ela deverá ser definida manualmente. Nesse caso:
Selecione: DATA➔ Type➔ Register, R[10]=50 (para uma velocidade de 50 mm/s)
Selecione: DATA➔ Type➔ Register, R[10]=50 (para uma velocidade de 50 mm/s)