Robôs Fanuc
Esta seção da documentação fornece uma visão geral das operações típicas usando um robô Fanuc para preparar um novo programa no RoboDK e transferi-lo para o robô. O RoboDK suporta todos os controladores de robôs Fanuc desde o RJ2, incluindo o RJ3, o R-30iA e o R-30iB. Esta documentação é baseada no controlador Fanuc R-30iA.
Transferir um programa de robô
É necessário seguir estas etapas para carregar um programa a partir de uma unidade USB:
1.Conecte a unidade USB no pingente de ensino
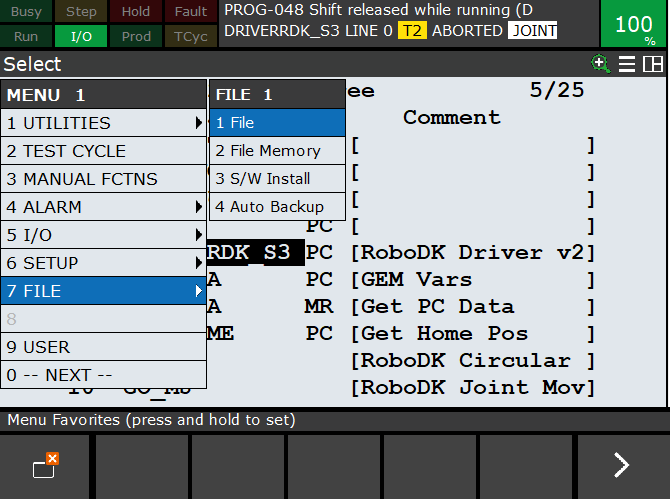
2.Selecione Menu➔ File
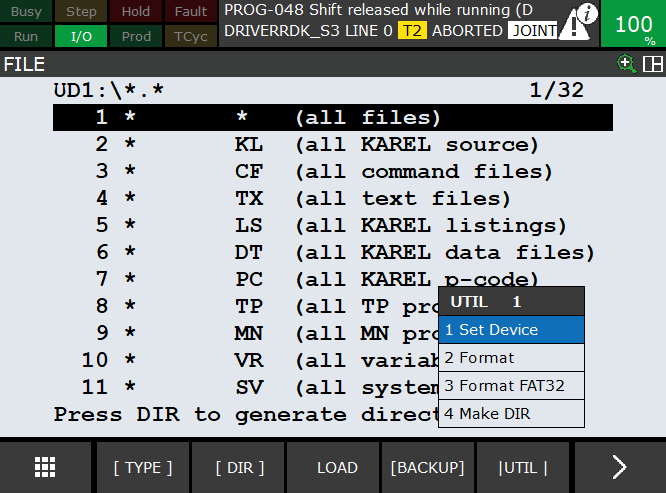
3.Selecione Utilities➔ Set device➔ USB
4.Selecione DIR
5.Selecione o arquivo de programa TP ou LS no disco USB (BALLBARTEST.TP, por exemplo)
Isso salvará automaticamente o arquivo na memória FR do controlador
6.Selecione o programa na memória FR e selecione LOAD (botão de tela)
Selecione: DATA➔ Type➔ Register, R[10]=50 (para uma velocidade de 50 mm/s)
Iniciar um programa de robô
Siga estas etapas para iniciar um programa de robô no controlador de robô Fanuc.
1.Selecione FCN (botão terminal de programação)➔ Abort All
2.Selecionar SELECT (botão terminal de programação)
3.Selecione o programa (BALLBARTEST, por exemplo)
4.Pressione e mantenha pressionado o interruptor Deadman
5.Selecione RESET. Todos os alarmes devem desaparecer.
6.Selecione e mantenha pressionado o botão SHIFT do professor
7.Selecione FWD (botão no terminal de programação)
Obtenha as posições de eixos do robô
Siga estas etapas no terminal de programação Fanuc para obter as posições de eixos do robô de seu robô real.
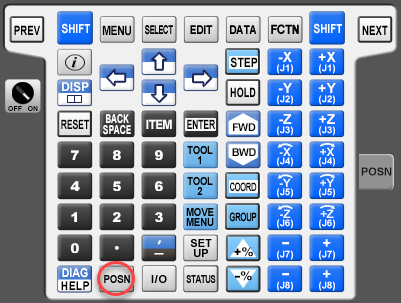
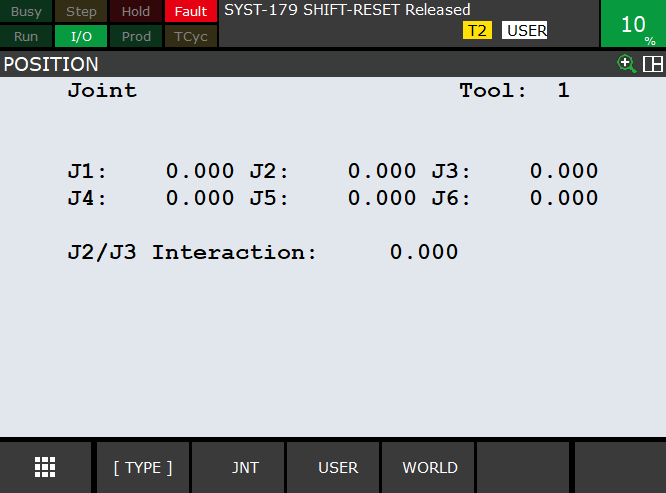
1.Selecione POSN (botão no terminal de programação) para ver a posição atual do robô
2.Selecione JNT na tela ou selecione COORD (botão no terminal de programação) para selecionar o modo de junções.
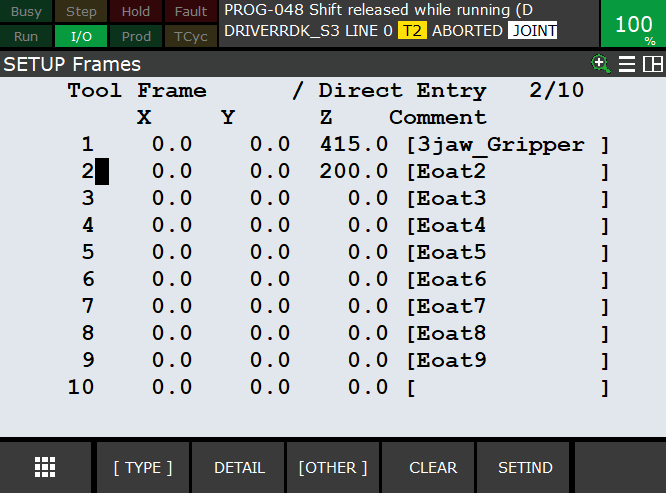
Obter a ferramenta do robô (TCP )
As ferramentas do robô são armazenadas como registros nos controladores Fanuc (UTOOL). Essas etapas permitem que você crie ou modifique as ferramentas do robô (TCP, também conhecido como UTOOL na programação de robôs Fanuc).
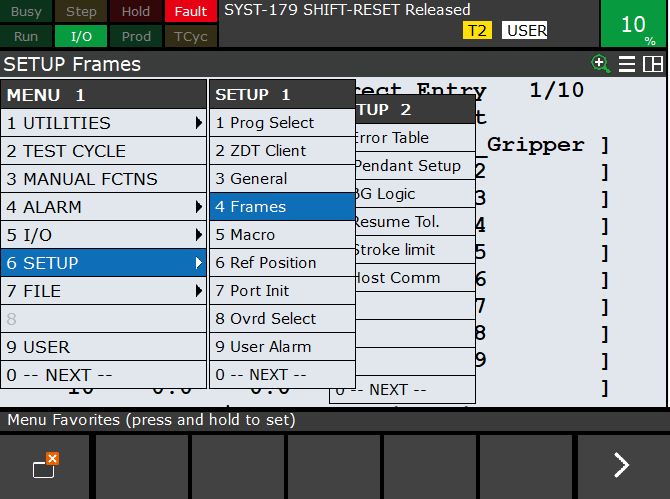
1.Selecione MENU➔ Setup➔ Frames
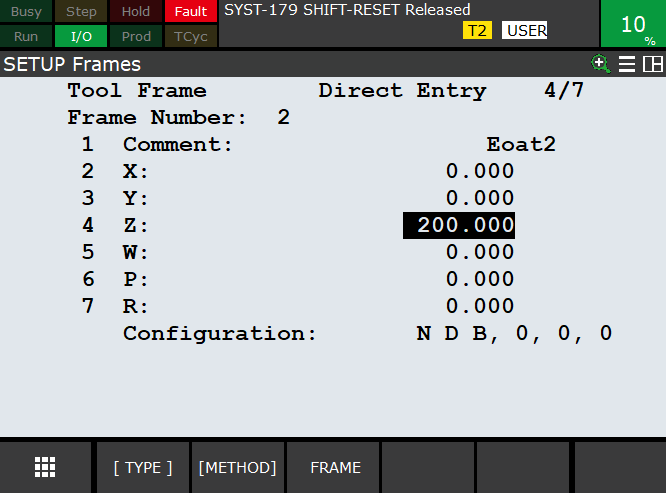
2.Selecione uma ferramenta usando as setas ou a tela sensível ao toque e selecione ENTER.
3.Modifique os valores de X,Y,Z,W,P,R conforme necessário.
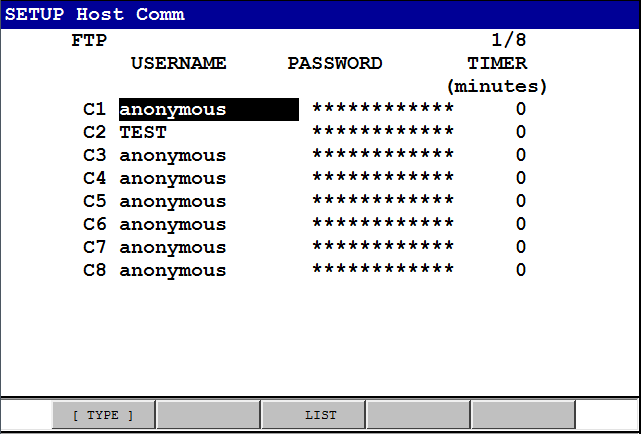
Configuração do servidor FTP da Fanuc
O servidor FTP da Fanuc está habilitado nos controladores Fanuc recentes por padrão.
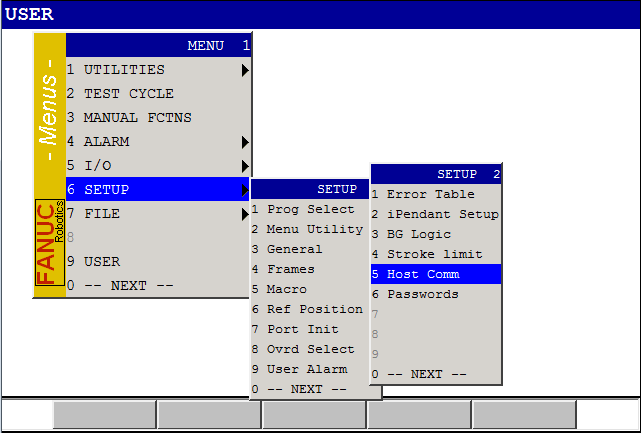
Você pode validar as credenciais de FTP no menu:
1.Setup➔ Host Comm
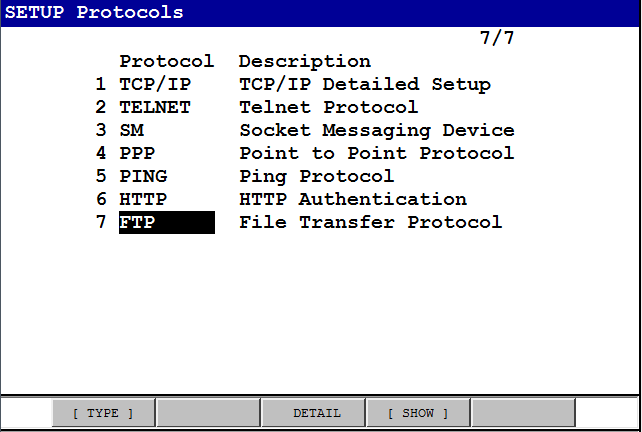
2.Selecione FTP
Se vir um nome de usuário anônimo, talvez seja possível conectar-se por FTP sem credenciais.
Driver RoboDK para Fanuc
Você pode estabelecer uma conexão entre o RoboDK e o controlador do robô Fanuc para mover o robô automaticamente a partir de um PC conectado usando o RoboDK.
Isso permite que você use a opção RoboDK Executar no Robô para programação e depuração on-line. A conexão pode ser estabelecida por meio de uma conexão Ethernet padrão (TCP/IP).
Os drivers de robô oferecem uma alternativa à programação off-line (em que um programa é gerado e, em seguida, transferido para o robô e executado). Com os drivers de robô, é possível executar uma simulação diretamente no robô (Programação on-line). Mais informações estão disponíveis na seção Robot Drivers.
Siga estas etapas para configurar o driver do RoboDK para o Fanuc:
1.Faça o download dos arquivos do programa do driver Fanuc da área do cliente e transfira os seguintes programas do robô para o controlador do robô Fanuc:
a.RDK_S3.PC➔ Este é o programa principal que gerencia a comunicação por meio do S3 (porta de comunicação do soquete número 3 - S3). Certifique-se de selecionar a versão correta (os controladores de robôs Fanuc mais recentes exigem o uso da versão na pasta V9).
b.GO_MJ.TP
c.GO_ML.TP
d.GO_MC.TP
e.GO_PROG.TP
Siga estas etapas no terminal de programação do robô para preparar a comunicação entre o robô Fanuc e o RoboDK:
1.Selecione Menu-(Next)-System-[TYPE]-Variables.
a.Selecione $HOSTS_CFG (manter a tecla shift pressionada enquanto seleciona o ajudará a rolar a tela para baixo mais rapidamente)
b.Selecione o número 3
c.Defina $SERVER_PORT como 2000
($HOSTS_CFG[3].$SERVER_PORT = 2000)
2.Selecione Menu-Setup
3.Selecione [TYPE]-Host comm
4.Selecione [SHOW]-Servers
5.Selecione "S3"-Enter.
a.Definir o nome do protocolo como SM
b.Em Port Name (Nome da porta), se houver várias portas disponíveis: Defina Port como P3 (ou a porta correspondente).
c.Definir o tempo limite de inatividade como 9999
d.Definir o estado de inicialização como [CHOICE] START
e.Definir o estado atual como STARTED:
Para fazer isso, selecione [ACTION]-DEFINE e, em seguida, [ACTION]-START
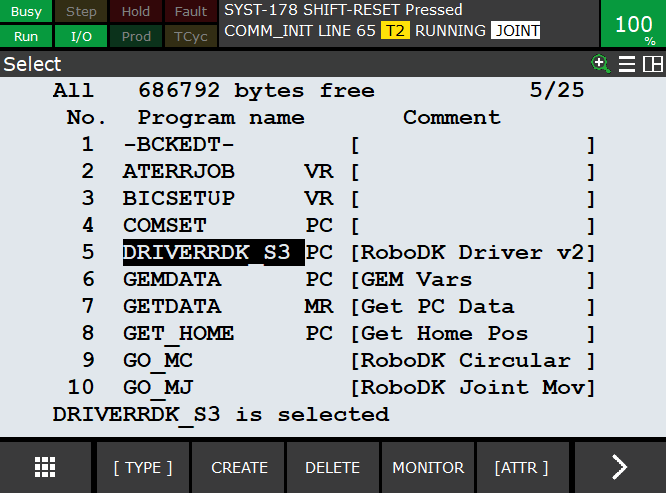
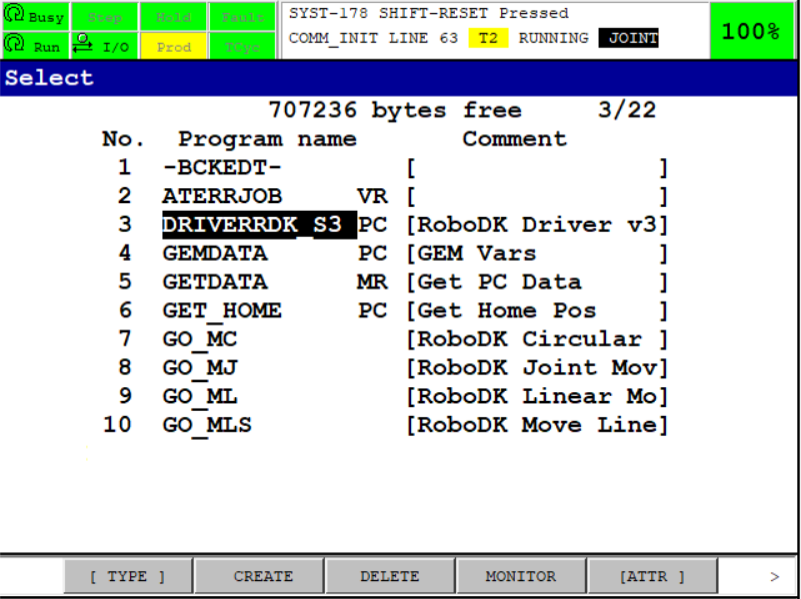
6.Inicie o programa RDK_S3:
a.Selecione o botão SELECT no terminal de programação.
b.Role a tela para baixo até o programa RDK_S3
c.Selecione Enter (botão do terminal de programação)
d.Selecione Shift-Reset e Shift-Forward para iniciar o programa
Você deverá ver a mensagem RUNNING (Executando) no pendente de aprendizagem. Se o programa não for executado, é provável que você não tenha uma opção de robô (interface de PC ou User Socket Messaging) ou não tenha obtido a versão correta do programa de PC.
7.No RoboDK, forneça o IP do robô e selecione Connect para se conectar ao robô.
Configuração do driver
Você pode definir configurações adicionais do driver usando o arquivo INI. Isso permite que você configure como mapear os eixos externos.
Quando Você executar o driver pela primeira vez, ele gerará um arquivo contendo sinalizadores para a configuração de parâmetros avançados do driver, como o mapeamento de eixos externos. O local desse arquivo de configurações pode ser encontrado no início do registro do driver, na linha que começa com Loading settings.
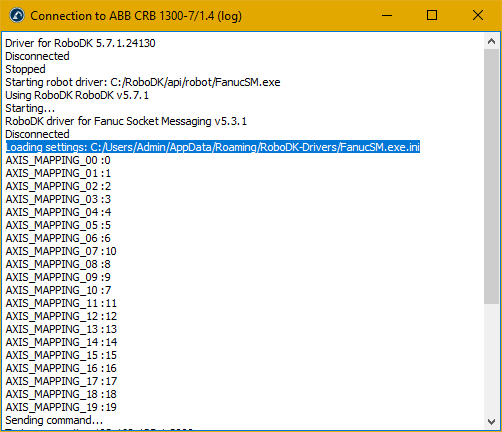
Você pode abrir esse arquivo com qualquer editor de texto e encontrará uma lista de eixos usados pelo RoboDK e os eixos correspondentes no lado do controlador do robô Fanuc. Além disso, você pode ativar a impressão de depuração extra e alterar o número de grupos de movimento que serão usados.
Se, por exemplo, o eixo 8 no RoboDK corresponder ao eixo 9 no controlador do robô, basta alterar o número do lado direito para o valor correto. O mapeamento configurado pode ser visto na mensagem de inicialização abaixo da mensagem Loading settings (Carregando configurações).
Os eixos 0-9 são do grupo de movimento 1 e os eixos 10-17 são do grupo de movimento 2; portanto, se o eixo externo estiver no segundo grupo de movimento, ele corresponderá aos eixos 10 no arquivo de configuração.
Compilação de programas (LS vs. TP)
Esta seção explica a diferença entre os arquivos de programa Fanuc LS e TP e como compilar automaticamente os programas para os robôs Fanuc usando o RoboDK.
É necessário um arquivo binário para executar programas de robô em robôs Fanuc (TP, também conhecido como TPP). Os programas para robôs Fanuc gerados por software de programação off-line (como o RoboDK) estão no formato LS (ASCII, legível por texto e não compilado). Há duas opções para converter programas de robôs LS em programas TP:
1.Ter a opção de software ASCII Upload no robô. É possível que essa opção já esteja disponível no robô. A melhor maneira de verificar se essa opção está disponível é fornecer um arquivo LS ao robô e ele deverá ser automaticamente convertido em um arquivo TP. Por exemplo, coloque o arquivo no disco FR e selecione LOAD no terminal de programação.
2.Compilar o programa usando as ferramentas WinOLPC do Roboguide. Nesse caso, o mesmo computador em que o RoboDK está instalado pode compilar o programa LS automaticamente usando a ferramenta de compilação "maketp.exe" da Fanuc. Esse comando requer um arquivo " robot.ini ". Esse arquivo pode ser gerado com o utilitário setrobot.exe do WinOLPC se o Roboguide estiver instalado e uma estação de trabalho tiver sido salva no computador ("Work Cell").
Se Você tiver as ferramentas do Roboguide WinOLPC instaladas no local padrão, o RoboDK automaticamente os programas TP logo após a geração de um programa LS.
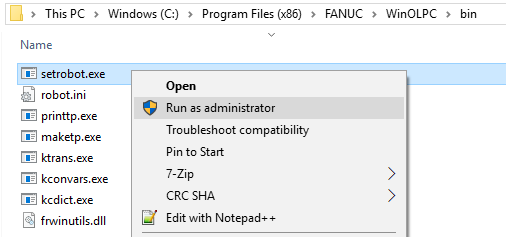
Certifique-se de que você tenha selecionado um robô usando o arquivo executável setrobot. Se o arquivo TP não for gerado e você tiver o Roboguide WinOLPC instalado, talvez seja necessário seguir estas etapas:
1.Abra o Windows Explorer e navegue até a pasta de instalação do WinOLPC:
C:\ Program Files (x86)\FANUC\WinOLPC\bin
2.Clique com o botão direito do mouse no arquivo setrobot.exe e selecione Executar como administrador
3.Selecione a Work Cell do robô (é necessário um Roboguide WorkCell)
Como alternativa, o conteúdo da pasta a seguir pode ser copiado da pasta padrão:
C:\Program Files (x86)\FANUC\WinOLPC\bin
para a pasta:
C:\RoboDK\api\Fanuc
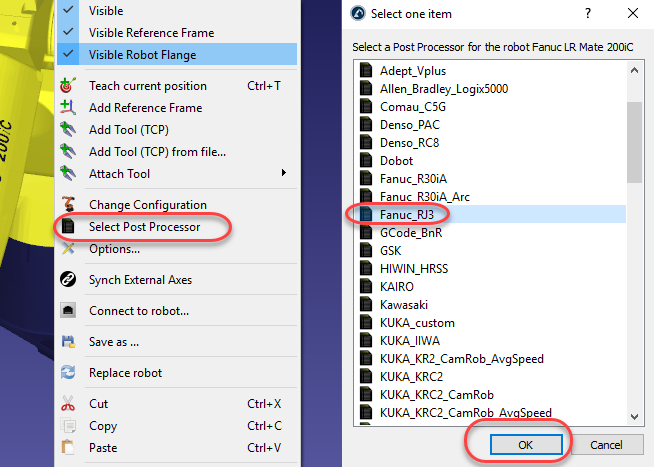
Siga estas etapas para selecionar um pós-processador compatível com os controladores Fanuc RJ3:
1.Clique com o botão direito do mouse no robô
2.Selecione Select Post Processor
3.Selecione Fanuc RJ3
4.Gerar seu programa (F6)
Siga estas etapas se você não instalou o Roboguide WinOLPC no local padrão e deseja obter um arquivo TP automaticamente quando gerar um programa a partir do RoboDK:
1.Selecione Programa ➔ Adicionar/Editar Pós-processador
2.Selecione Fanuc RJ3 (ou o pós-processador que você gostaria de usar). Todos os pós-processadores também podem ser acessados por meio da pasta: C:/RoboDK/Posts/. Além disso, verifique se você não está usando um pós-processador compilado.
3.Localize a variável PATH_MAKE_TP (por volta da linha 103) e digite o caminho em que o executável maketp está localizado.
Os pós-processadores RoboDK para robôs Fanuc suportam o uso de robôs de 6 eixos sincronizados com eixos externos, como plataformas giratórias ou eixos lineares.
Atualização dos parâmetros cinemáticos do controlador
Esta seção explica como Você pode atualizar os parâmetros cinemáticos (tabela DH) no controlador do robô depois de calibrar o robô usando o pacote de Calibração e Desempenho do RoboDK.
A modificação dos parâmetros DH do controlador afetará todos os programas criados manualmente no controlador. Mantenha uma cópia dos parâmetros DH originais, caso você queira voltar às configurações de fábrica do controlador.
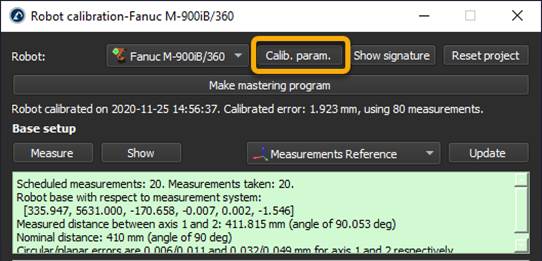
1.Na janela de calibração, abra os Parâmetros de calibração.
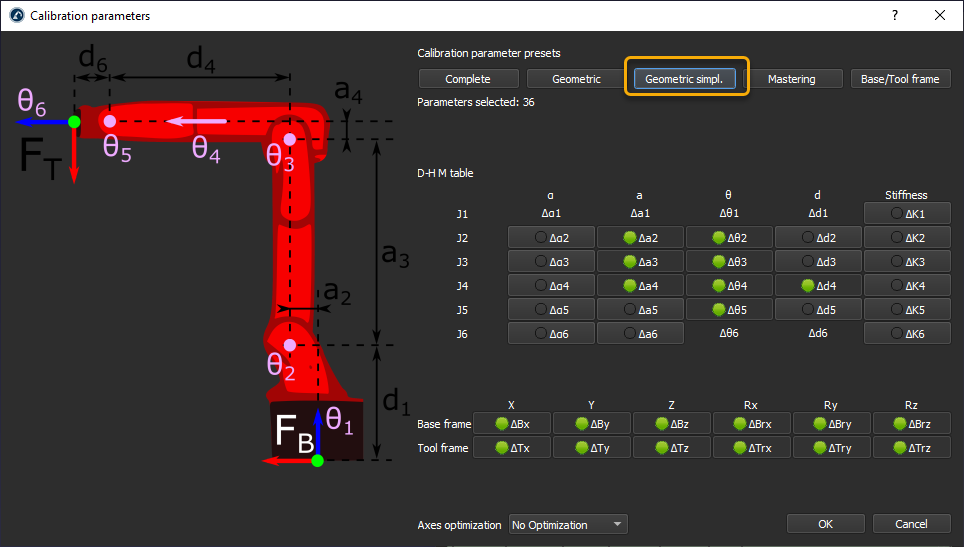
2.Selecione Geometric simplified (Geométrico simplificado).
3.Executar uma sequência de calibração ou atualizar uma já existente.

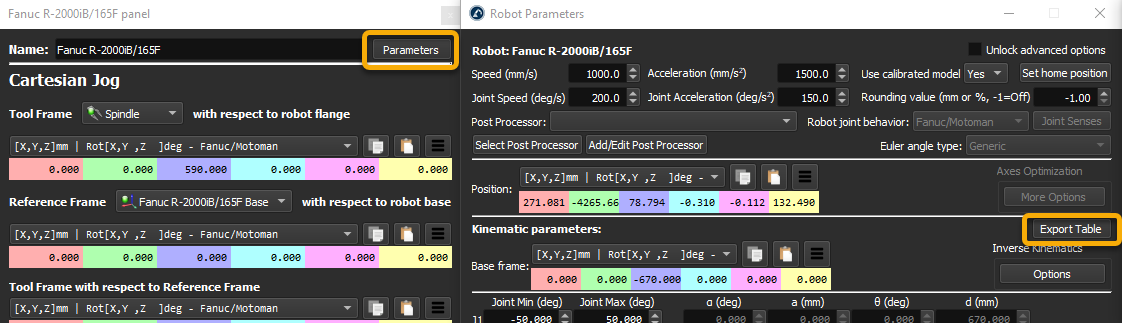
4.Recupere os parâmetros DH calibrados do robô. No painel Robô, selecione Parâmetros. Em seguida, selecione Exportar tabela.
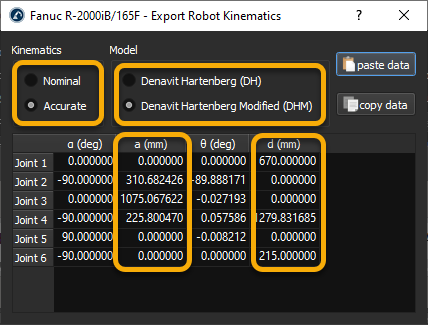
5.Certifique-se de usar a cinemática Accurate. O Nominal pode ser usado para comparar com os parâmetros DH padrão do controlador.
6.Use o modelo Danavit Hartenberg Modified para modificar os parâmetros do controlador.
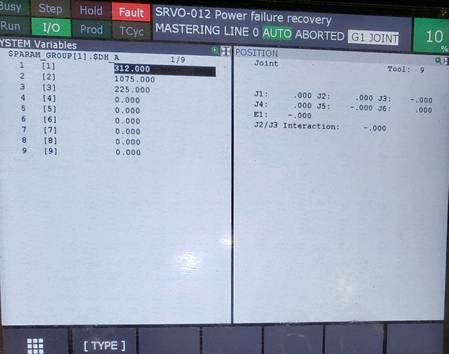
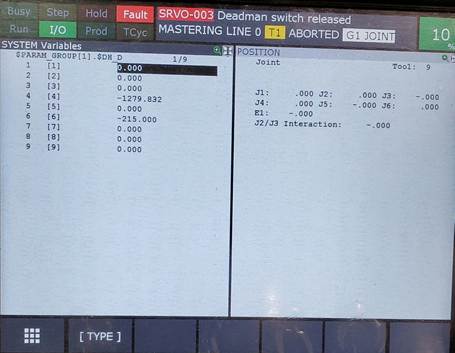
7.No terminal de programação do robô, abra as variáveis do sistema -> $PARAM_GROUP[1].
8.Encontre os parâmetros $DH_A e $DH_D.
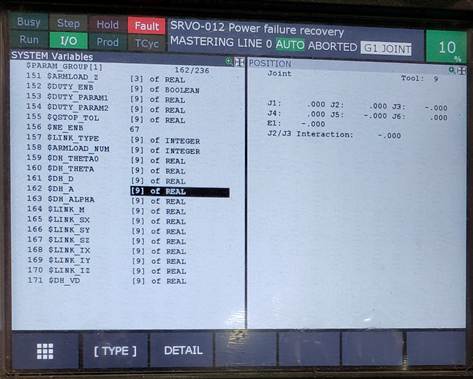
9.Modifique os valores DH com os valores a e d da janela Exportar cinemática do robô.