Os robôs Hans
Esta seção da documentação fornece uma visão geral da operação típica dos robôs Hans usando o RoboDK para enviar um programa ao controlador Hans.
Transferir um programa para o controlador Hans
Você pode importar manualmente os programas do robô gerados pelo RoboDK para o controlador do robô do seu Han.
Você deve seguir estas etapas para importar um programa RoboDK para o controlador Hans:
1.Inicie o controlador do Han e conecte-se ao robô.
2.No RoboDK, clique com o botão direito do mouse no programa que deseja importar e selecione Gerar programa do robô como....
3.O RoboDK solicitará que você salve dois arquivos: um é um script linha por linha dos comandos que serão enviados ao controlador e o outro é um arquivo .json a ser carregado no controlador.
4.Selecione o local em que deseja salvar cada arquivo; o arquivo .json pode ser salvo em um disco USB para ser importado para o controlador como um programa.
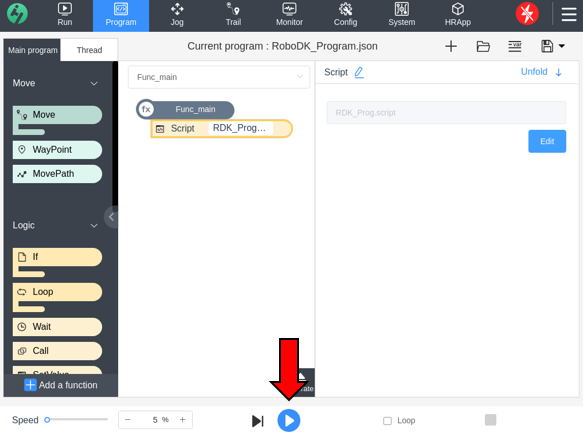
5.No controlador, navegue até a guia Program (Programa).
6.À direita do nome do "Programa atual" há um ícone de pasta. Selecione esse ícone para abrir a lista de arquivos do programa.
7.Selecione o botão "Import" (Importar) na parte inferior da lista.
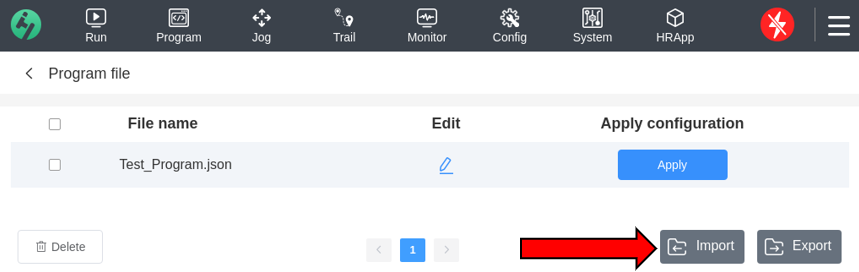
8.Localize o arquivo .json gerado pelo RoboDK no USB e selecione-o.
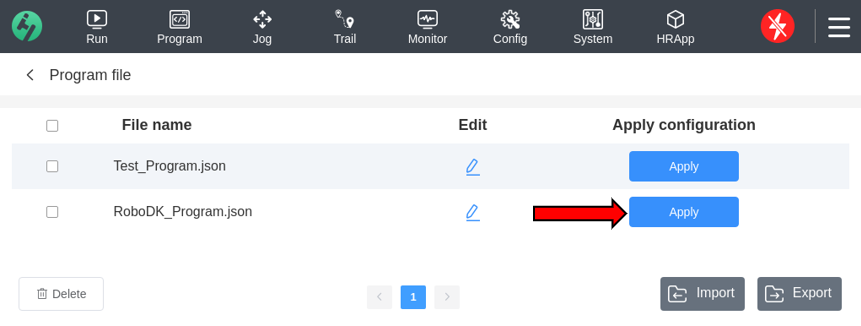
9.Clique em "Apply" (Aplicar) para definir o programa importado como o programa ativo.
10.O programa do RoboDK será importado como uma função que chama um script.
11.Selecione o botão azul de início para começar a executar o programa no robô.