Robôs Hanwha
O RoboDK é compatível com todos os controladores de robôs Hanwha. Você pode criar simulações e programas de robôs para a Hanwha e também pode mover o robô Hanwha real a partir do RoboDK usando o driver.
Driver RoboDK para Hanwha
Os drivers do robô oferecem uma alternativa à programação off-line. Com os drivers Hanwha, você pode mover um robô diretamente do RoboDK enquanto simula seu programa (Programação Online). Mais informações estão disponíveis na seção Robot Drivers.
Siga as etapas abaixo para configurar o RoboDK para trabalhar com os robôs Hanwha.
Etapa 1. Configurar o endereço IP do robô
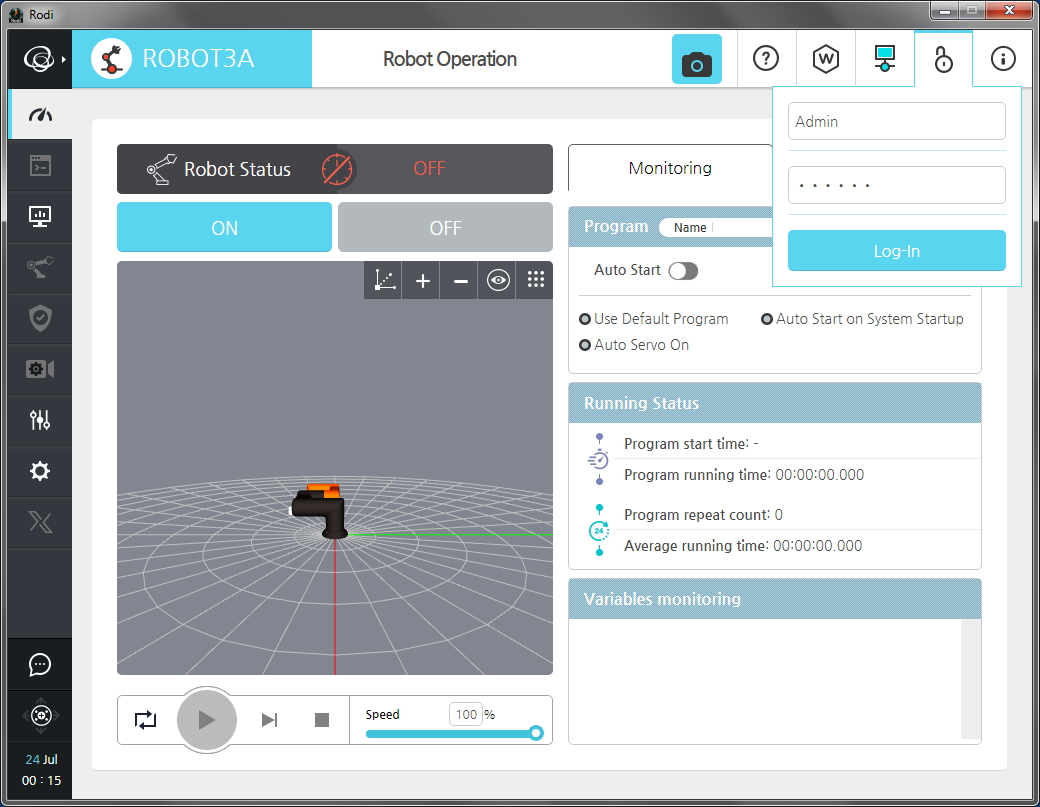
1.Faça login como administrador
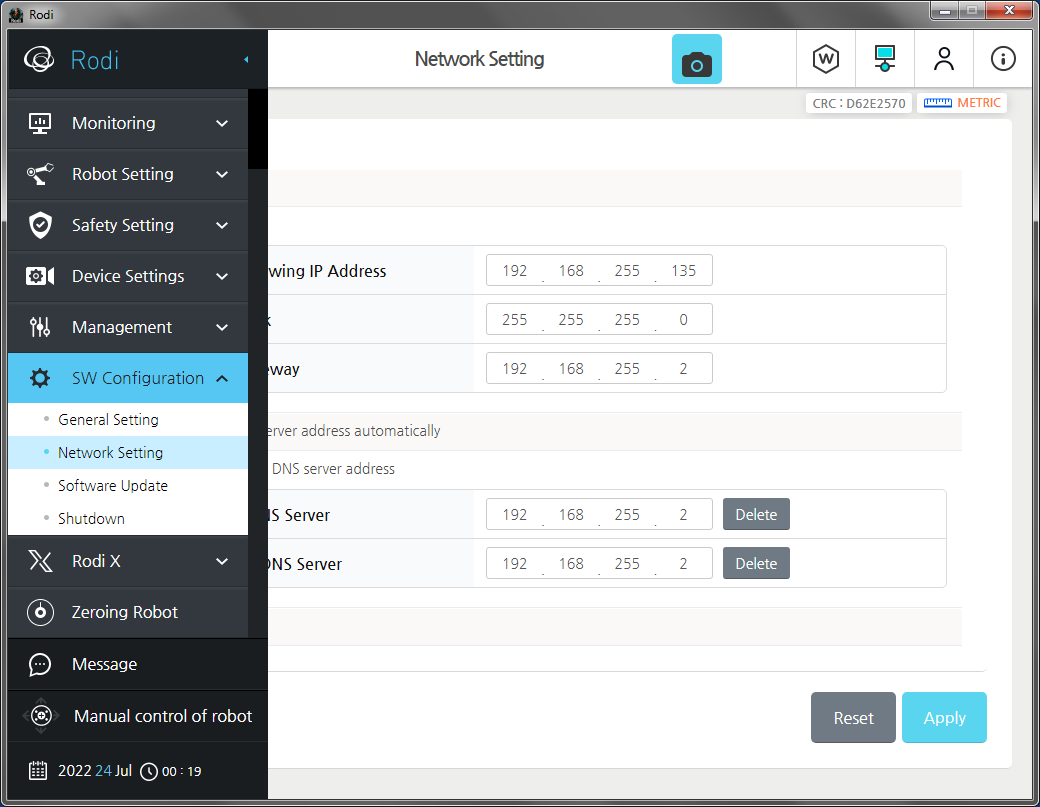
2.Abra o SW Configuration ⇒ Network Setting e preencha os parâmetros de sua rede local, especialmente o endereço IP e a máscara de sub-rede. Clique em Apply (Aplicar) e aceite reiniciar se o sistema solicitar.
Etapa 2. Instalar o plug-in do conector RoboDK
1.Faça login como administrador
2.Prepare uma unidade flash USB com o arquivo RoboDK.asar e conecte-a ao controlador do robô ou ao pendente de ensino.
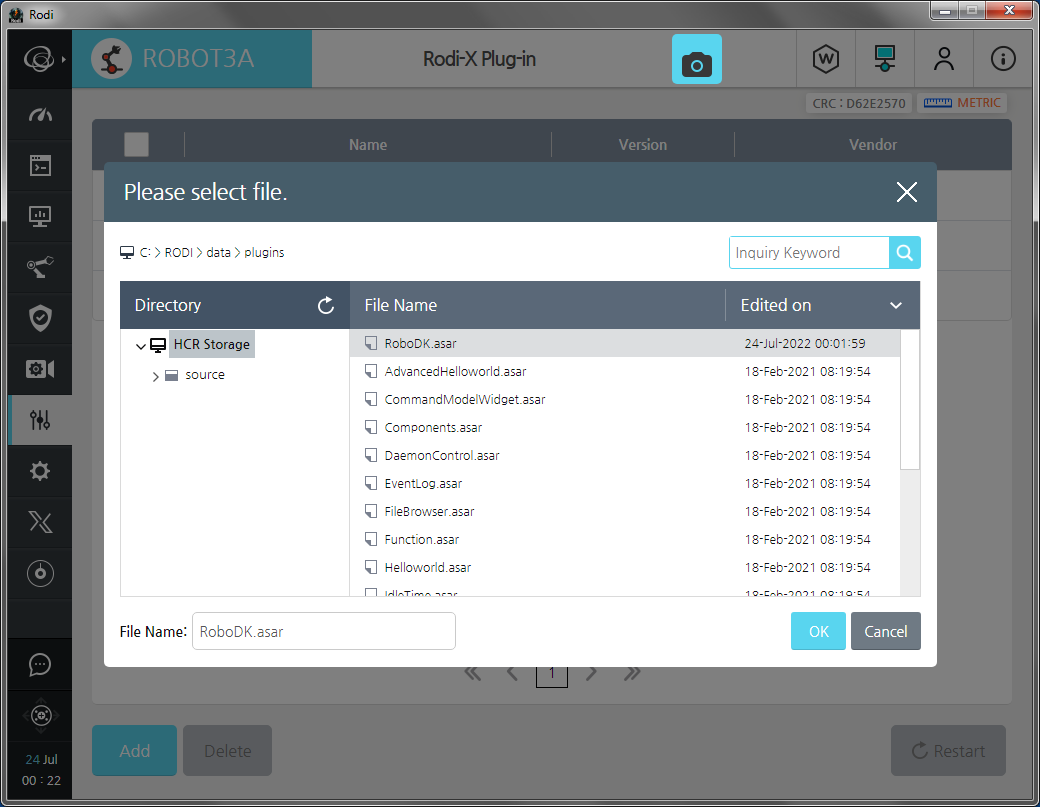
3.Abra o Management ⇒ Rodi-X Plug-in e clique no botão Add para abrir a caixa de diálogo Select File (Selecionar arquivo).
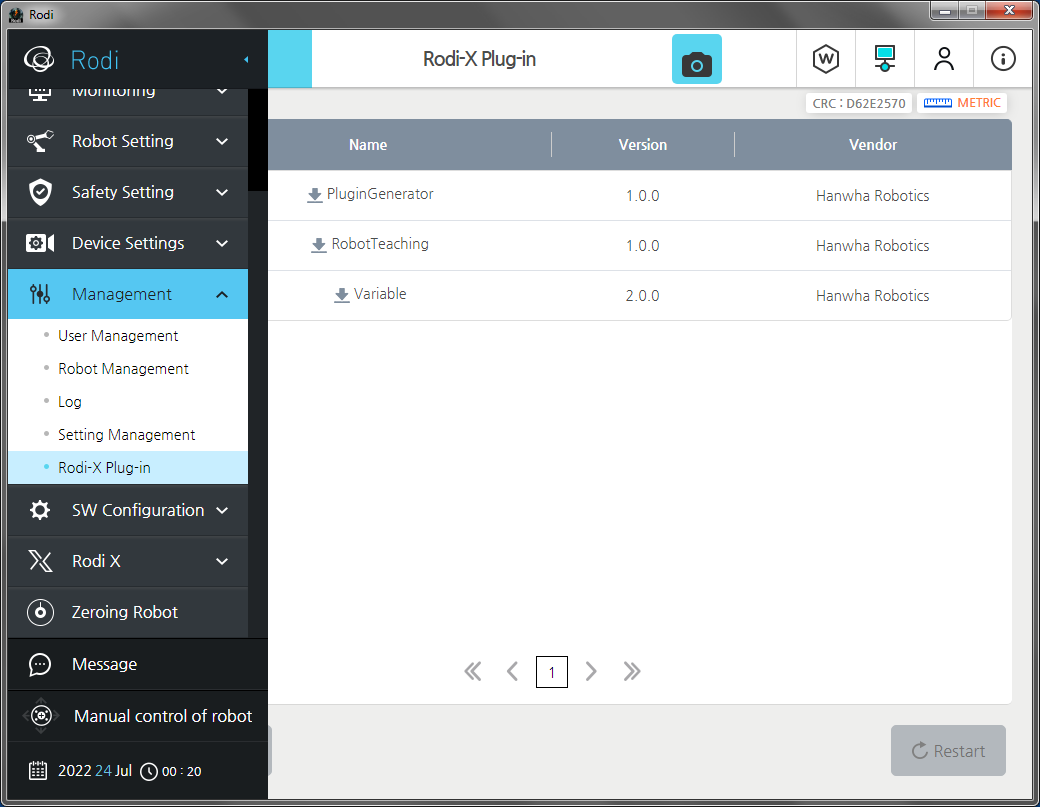
4.Escolha RoboDK.asar e clique em OK.
5.Pressione o botão Reiniciar.
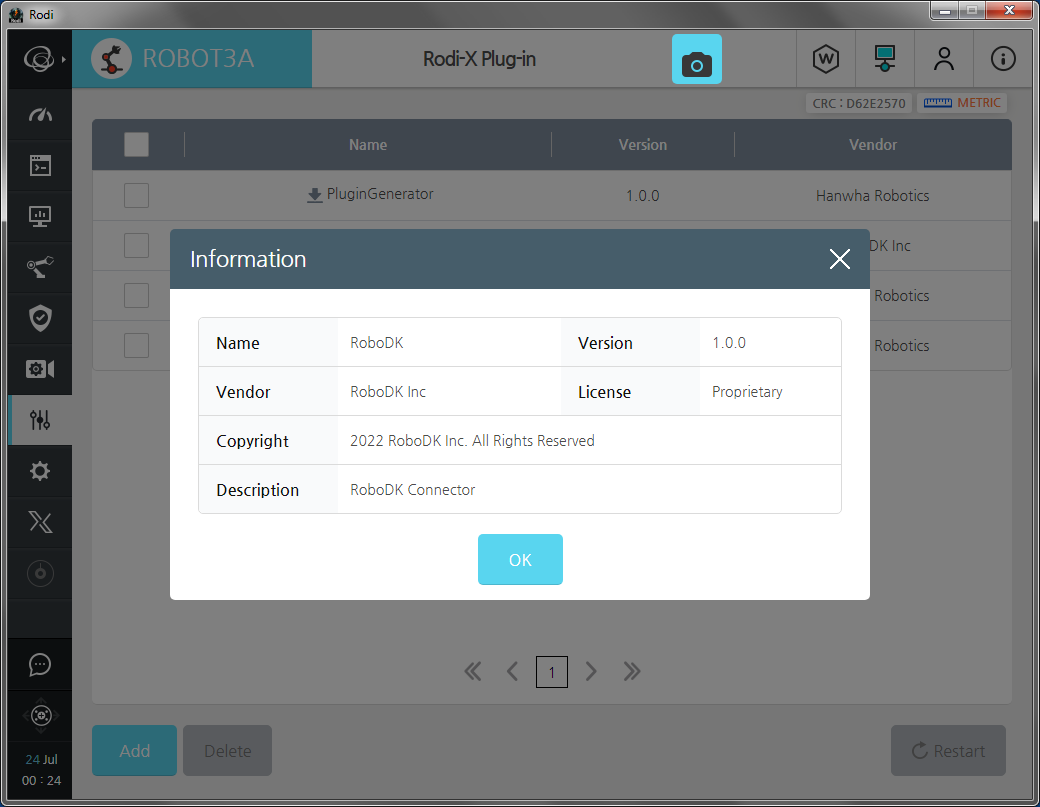
6.Após o recarregamento, você poderá ver informações sobre o plug-in.
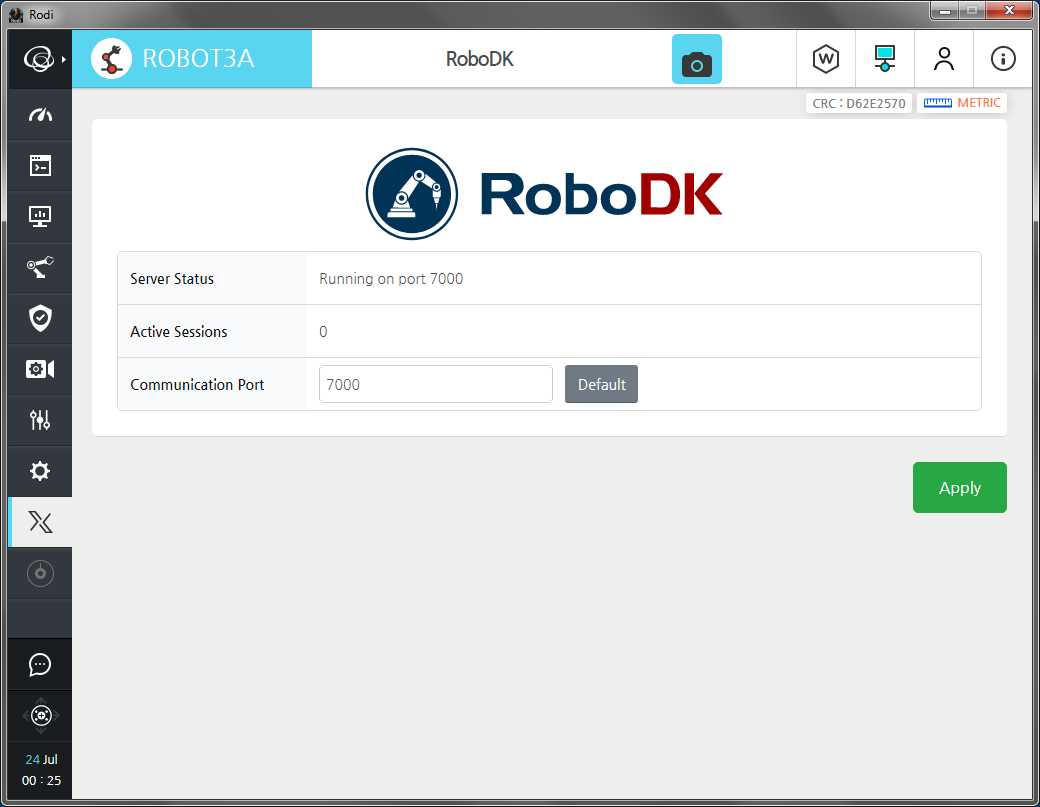
7.Abra o Rodi X⇒ RoboDK e certifique-se de que o campo Server Status (Status do servidor) não contenha mensagens de erro. Se a porta TCP 7000 parecer estar ocupada por outro aplicativo, você pode alterá-la inserindo outro valor no campo Communication Port (Porta de comunicação) e clicando em Apply (Aplicar).
8.Agora o robô está pronto para o controle remoto.
Etapa 3. Configurar a conexão do RoboDK
1.Configure seu projeto RoboDK e coloque um dos robôs Hanwha nele. Por exemplo, o HCR-3.
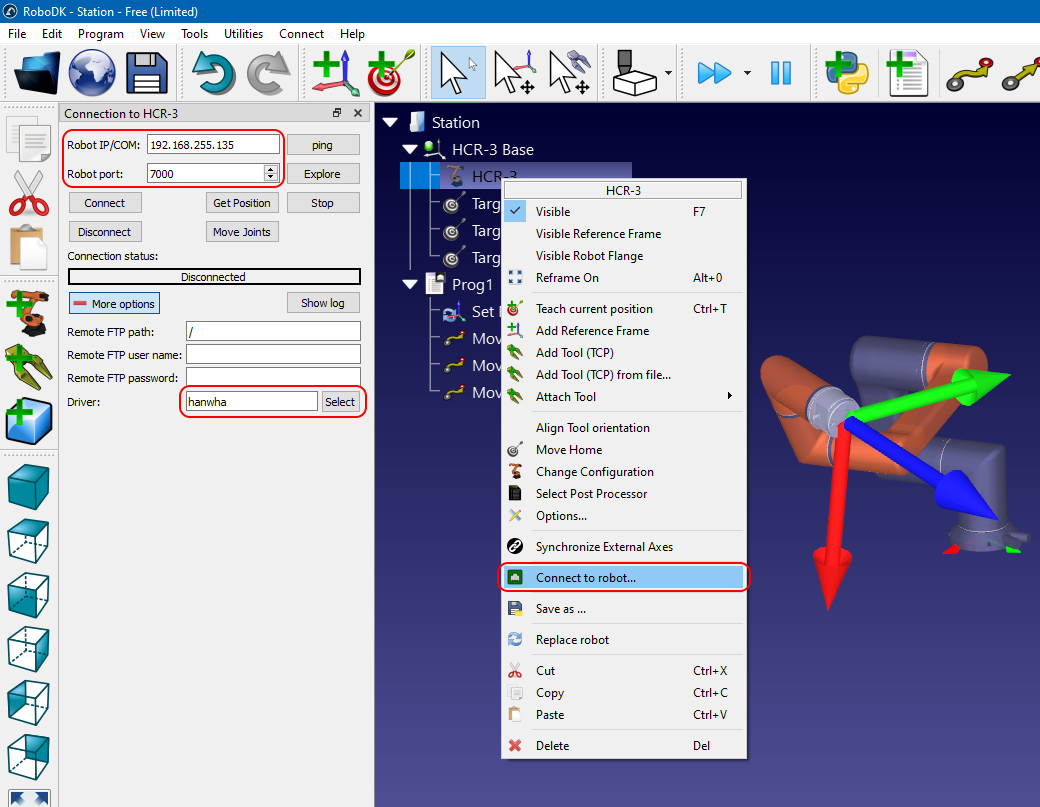
2.Clique com o botão direito do mouse no robô na árvore do projeto e selecione Conectar ao robô...
3.Na janela Connection to HCR-3, preencha os campos IP/COM do Robô e Porta do Robô (use o endereço IP do robô e o número da porta do RoboDK Plug-in).
4.Na mesma janela, clique no botão Mais opções e digite Hanwha no campo Driver (ou use o botão Selecionar para selecionar o driver apropriado na lista).
5.Clique no botão Conectar e, se todas as configurações estiverem corretas, você verá Pronto na barra de status da conexão.