Driver RoboDK para JAKA
Uma conexão entre o RoboDK e o robô JAKA pode ser estabelecida para mover o robô automaticamente a partir de um PC conectado usando o RoboDK. Isso permite usar a opção RoboDK Executar no Robô para programação e depuração on-line. A conexão pode ser estabelecida por meio de uma conexão Ethernet padrão (TCP/IP).
Siga estas etapas para configurar o driver do RoboDK para a programação on-line da JAKA:
1.Inicie o aplicativo JAKA Zu e conecte-se ao robô no aplicativo JAKA Zu.
2.Ligue e habilite o robô JAKA Zu.
3.Na barra de ferramentas do RoboDK, selecione Conectar ➔ Conectar ao Robô.
4.Em "Mais opções", selecione o driver JAKA: apijaka.py.
5.Use o IP e a porta do robô para conectá-lo no RoboDK.
6.Agora Você pode mover o robô JAKA diretamente do RoboDK
a.Para mover o robô para um ponto no RoboDK, clique duas vezes no ponto na árvore de estações e selecione os botões "Mover Eixos" ou "Mover Linear" na interface de conexão para efetuar uma articulação ou um movimento linear para o ponto.
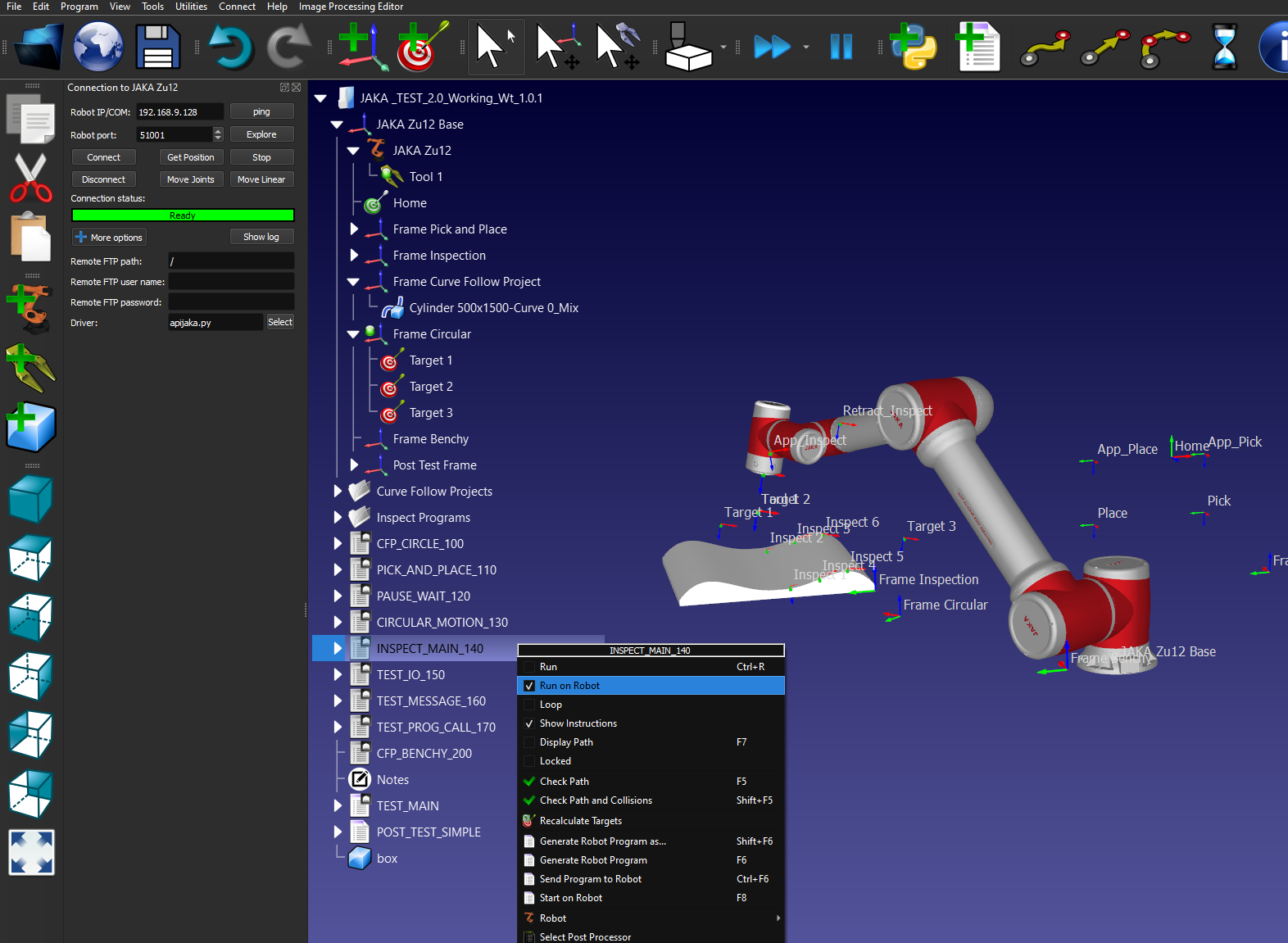
b.Para executar um programa no robô usando o driver, clique com o botão direito do mouse no programa desejado e selecione a opção "Executar no robô". Em seguida, clique duas vezes no programa para executá-lo no robô.