Substituir manualmente o frame de referência do robô
As etapas a seguir mostram como configurar manualmente o frame de referência do robô no aplicativo JAKA Zu.
Primeiro, você deve criar um frame JAKA Zu personalizado:
1.Na JAKA Zu, navegue até Settings➔ Operation Settings➔ User Coordinate System.
2.Clique no botão de edição para definir os valores de X, Y, Z, RX, RY e RZ para um frame personalizado.
3.Selecione confirmar para salvar o frame no JAKA Zu.
Em seguida, você deve substituir o frame importado pelo frame JAKA Zu:
4.Siga as etapas listadas em Enviar um programa para a JAKA Zu.
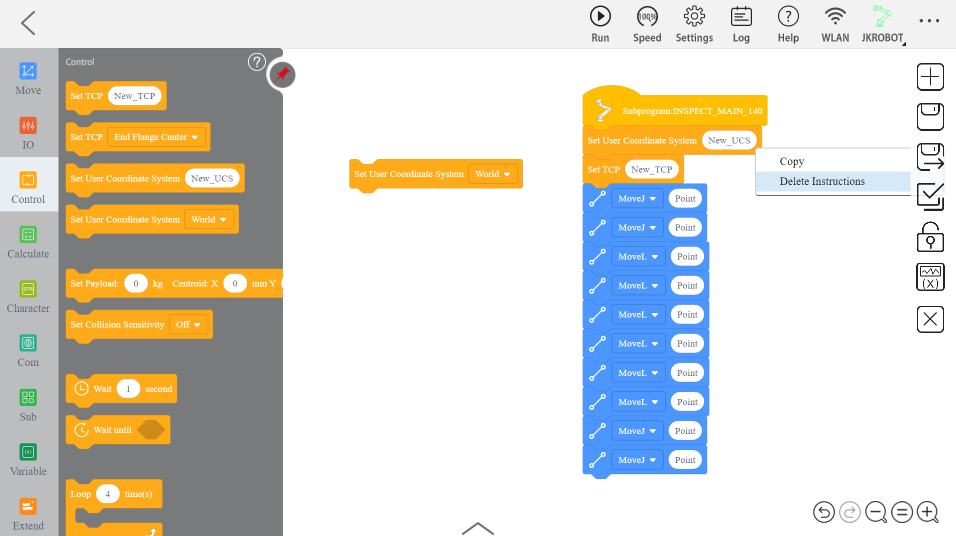
5.Abra a guia Controle na barra lateral e localize o bloco "Set User Coordinate System" (Definir sistema de coordenadas do usuário) que contém a caixa suspensa.
6.Remova o bloco "New_UCS" que foi importado automaticamente clicando com o botão direito do mouse nele e selecionando delete.
7.Substitua o bloco removido pelo bloco "Set User Coordinate System" (Definir sistema de coordenadas do usuário) e selecione o frame personalizado no menu suspenso.