Robôs JAKA
Esta seção da documentação fornece uma visão geral da operação típica dos robôs JAKA usando o software RoboDK para enviar um programa para o aplicativo controlador do robô JAKA.
Os recursos disponíveis incluem:
1.Controle do robô em tempo real usando o driver e o "Executar no Robô".
2.Enviar um programa para o aplicativo JAKA Zu usando o pós-processador e "Enviar Programa ao Robô" ou carregar manualmente o programa no JAKA Zu importando o arquivo .zip gerado pelo RoboDK.
Enviar um programa para o controlador JAKA por meio do RoboDK
Você pode enviar um programa para o controlador do robô JAKA com apenas alguns cliques a partir de uma simulação do RoboDK.
Você deve seguir estas etapas para carregar um programa do RoboDK no JAKA Zu:
1.Inicie o aplicativo JAKA Zu e conecte-se ao robô no aplicativo JAKA Zu.
2.Ligue e habilite o robô JAKA Zu.
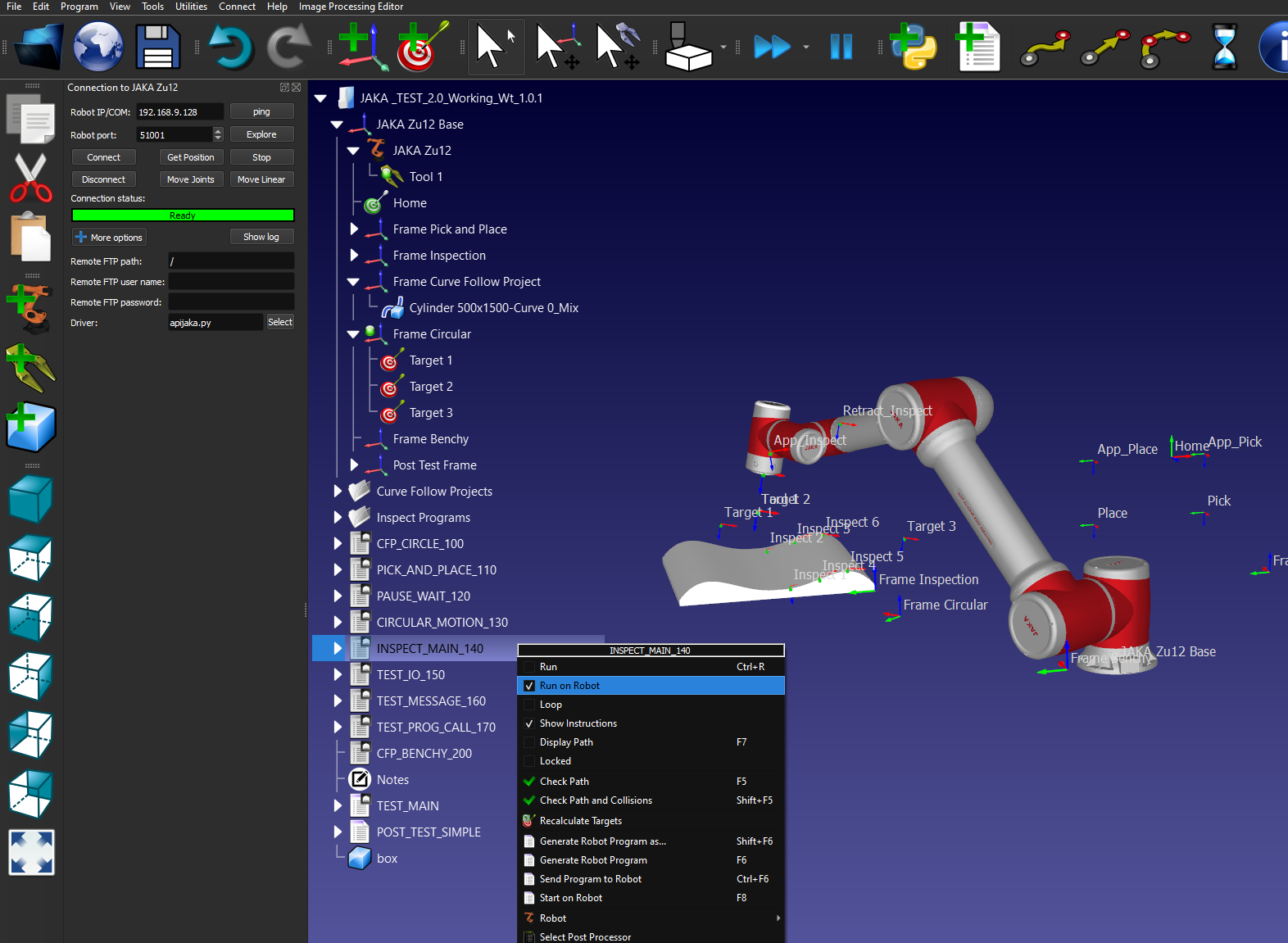
3.Na barra de ferramentas do RoboDK, selecione Conecta ➔ Conectar ao Robô.
Em Mais opções, certifique-se de que o driver JAKA esteja selecionado: apijaka.py.
4.Use o IP e a porta do robô para conectá-lo no RoboDK.
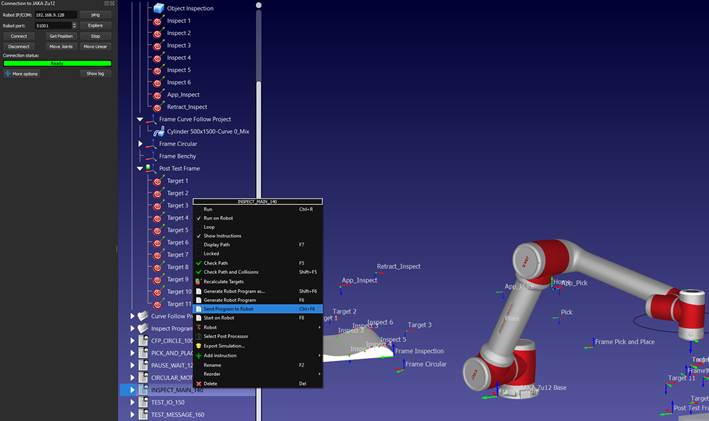
5.Clique com o botão direito do mouse no programa que Você deseja enviar para a JAKA Zu e selecione Enviar Programa ao Robô.
6.No JAKA Zu, navegue até a guia Programming Control (Controle de programação).
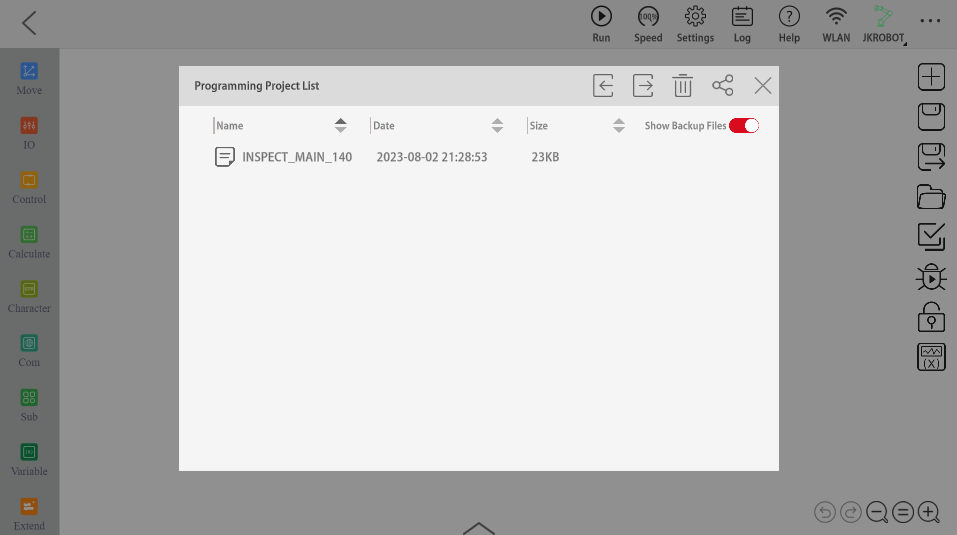
7.Abra a Lista de Projetos de Programação clicando no ícone da pasta e selecione o programa importado.
Importar manualmente um programa para o controlador JAKA
Você pode importar manualmente os programas do robô gerados pelo RoboDK para o controlador do robô JAKA.
Você deve seguir estas etapas para importar um programa RoboDK para o JAKA Zu:
1.Inicie o aplicativo JAKA Zu e conecte-se ao robô no aplicativo JAKA Zu.
2.Ligue e habilite o robô JAKA Zu.
3.Clique com o botão direito do mouse no programa que você deseja importar para o JAKA Zu e selecione Gerar Programa do Robô como....
4.Selecione o local em que o programa deve ser sponto.
5.No JAKA Zu, navegue até a guia Programming Control (Controle de programação).
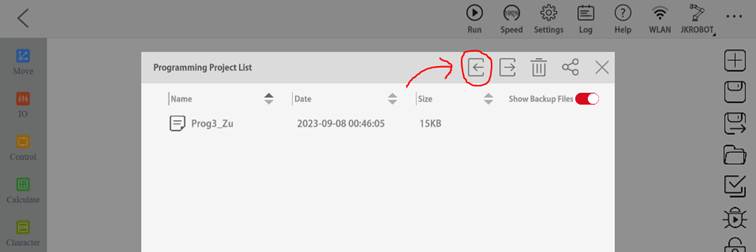
6.Abra a Programming Project List clicando no ícone da pasta e clique no ícone de importação.
7.Localize e selecione o arquivo .zip gerado pelo RoboDK.
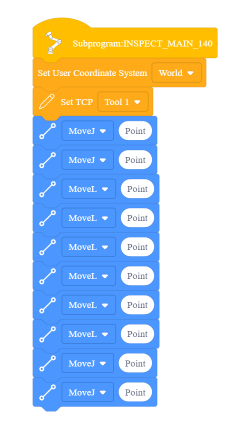
8.Abra a Programming Project List e selecione o programa importado.
Substituir manualmente o frame de referência do robô
As etapas a seguir mostram como configurar manualmente o frame de referência do robô no aplicativo JAKA Zu.
Primeiro, você deve criar um frame JAKA Zu personalizado:
1.Na JAKA Zu, navegue até Settings➔ Operation Settings➔ User Coordinate System.
2.Clique no botão de edição para definir os valores de X, Y, Z, RX, RY e RZ para um frame personalizado.
3.Selecione confirmar para salvar o frame no JAKA Zu.
Em seguida, você deve substituir o frame importado pelo frame JAKA Zu:
4.Siga as etapas listadas em Enviar um programa para a JAKA Zu.
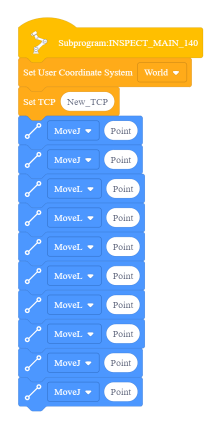
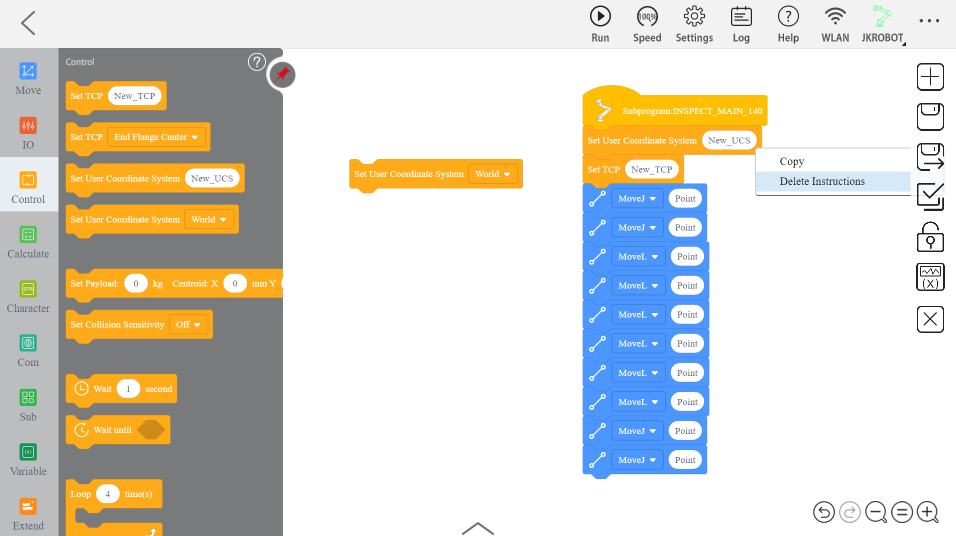
5.Abra a guia Controle na barra lateral e localize o bloco "Set User Coordinate System" (Definir sistema de coordenadas do usuário) que contém a caixa suspensa.
6.Remova o bloco "New_UCS" que foi importado automaticamente clicando com o botão direito do mouse nele e selecionando delete.
7.Substitua o bloco removido pelo bloco "Set User Coordinate System" (Definir sistema de coordenadas do usuário) e selecione o frame personalizado no menu suspenso.
Substituir manualmente a ferramenta do robô (TCP)
Você também pode configurar manualmente o TCP por meio do aplicativo JAKA Zu. As etapas a seguir descrevem esse processo.
Primeiro, você deve criar uma ferramenta JAKA Zu personalizada:
1.Na JAKA Zu, navegue até Settings➔ Operation Settings➔ TCP Settings.
2.Clique no botão de edição para definir os valores X, Y, Z, RX, RY e RZ para o TCP personalizado.
3.Selecione confirmar para salvar a ferramenta no JAKA Zu.
Em seguida, você deve substituir a ferramenta importada pela ferramenta JAKA Zu:
4.Siga as etapas listadas em Enviar um programa para a JAKA Zu.
5.Abra a guia Controle na barra lateral e localize o bloco "Set TCP" que contém a caixa suspensa.
6.Remova o bloco "New_TCP" que foi importado automaticamente clicando com o botão direito do mouse nele e selecionando delete.
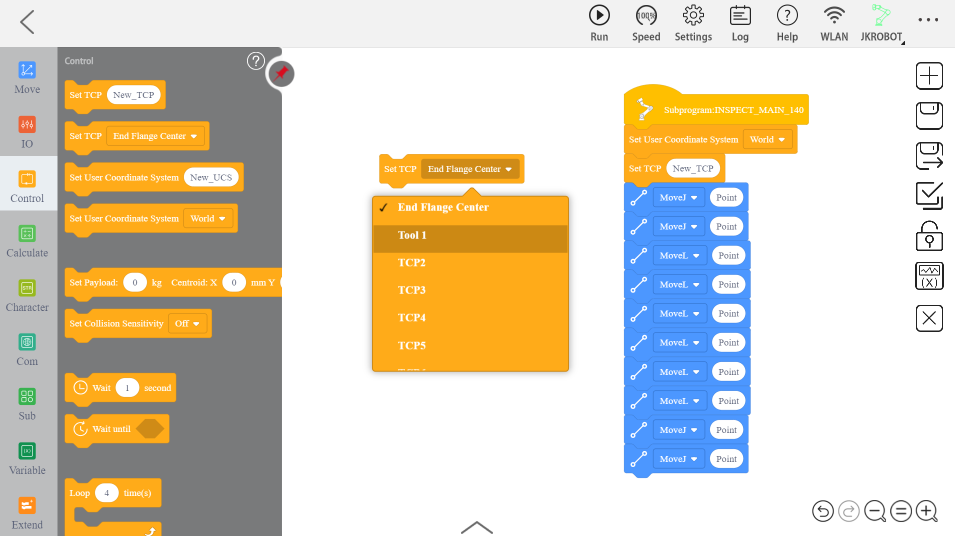
7.Substitua o bloco removido pelo bloco suspenso "Set TCP".
8.Selecione a ferramenta desejada no menu suspenso.
Inicie um programa de robô
Siga estas etapas para iniciar um programa de robô em um robô JAKA.
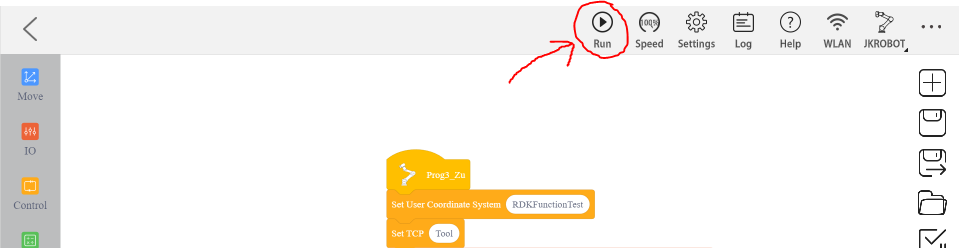
1.Siga as etapas listadas em Enviar um programa para a JAKA Zu.
2.Na barra de ferramentas superior, selecione "Run" (Executar).
Driver RoboDK para JAKA
Uma conexão entre o RoboDK e o robô JAKA pode ser estabelecida para mover o robô automaticamente a partir de um PC conectado usando o RoboDK. Isso permite usar a opção RoboDK Executar no Robô para programação e depuração on-line. A conexão pode ser estabelecida por meio de uma conexão Ethernet padrão (TCP/IP).
Siga estas etapas para configurar o driver do RoboDK para a programação on-line da JAKA:
1.Inicie o aplicativo JAKA Zu e conecte-se ao robô no aplicativo JAKA Zu.
2.Ligue e habilite o robô JAKA Zu.
3.Na barra de ferramentas do RoboDK, selecione Conectar ➔ Conectar ao Robô.
4.Em "Mais opções", selecione o driver JAKA: apijaka.py.
5.Use o IP e a porta do robô para conectá-lo no RoboDK.
6.Agora Você pode mover o robô JAKA diretamente do RoboDK
a.Para mover o robô para um ponto no RoboDK, clique duas vezes no ponto na árvore de estações e selecione os botões "Mover Eixos" ou "Mover Linear" na interface de conexão para efetuar uma articulação ou um movimento linear para o ponto.
b.Para executar um programa no robô usando o driver, clique com o botão direito do mouse no programa desejado e selecione a opção "Executar no robô". Em seguida, clique duas vezes no programa para executá-lo no robô.
Recuperando o endereço IP do simulador virtual JAKA
Para recuperar um endereço IP do simulador virtual, você deve decodificar a cadeia de caracteres Base64 necessária no campo Robot Address (Endereço do robô) mostrado abaixo:
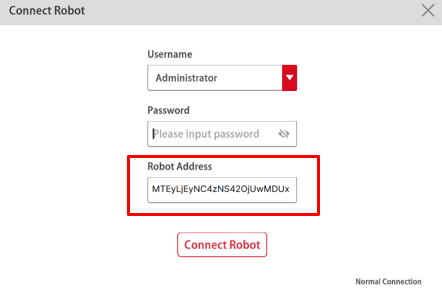
Usando ferramentas como https://www.base64decode.net/, você pode recuperar o IP e a porta do robô a partir do endereço do robô.


Neste exemplo, o IP é 112.124.35.6 e a porta é 50051.