Executar o programa do RoboDK
Os drivers do robô oferecem uma alternativa à programação off-line (em que um programa é gerado e, em seguida, transferido para o robô e executado). Você pode executar uma simulação do RoboDK diretamente no robô (Programação Online). Mais informações sobre os drivers estão disponíveis na seção Robot Drivers.
Siga estas etapas para se conectar ao robô a partir do RoboDK:
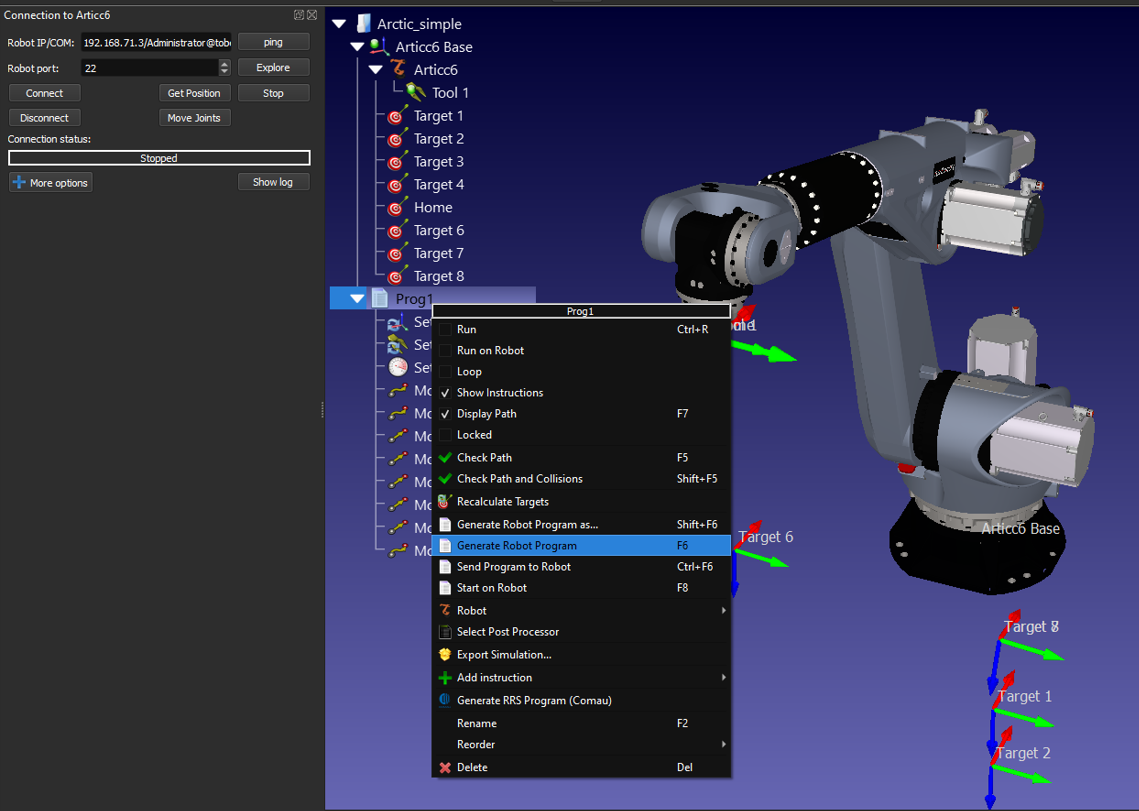
1.Clique com o botão direito do mouse no robô no RoboDK.
2.Selecione: 
3.Digite o IP do robô.
4.Selecione Conectar.
Deve haver uma mensagem verde exibindo Pronto se a conexão foi bem-sucedida. Caso contrário, verifique se o IP, o nome de usuário e a senha estão corretos. Além disso, certifique-se de formatar corretamente o endereço IP no RoboDK, conforme mencionado nas seções anteriores (127.0.0.1/username@password).
O robô pode ser movido selecionando Obter posições de eixo do robô no menu de conexão, movimentar o robô e clicar em Mover eixos para mover o robô no menu de conexão.
Para executar programas do PC diretamente no robô, você deve ativar a opção Executar no robô em seus programas. As etapas a seguir descrevem como ativar a opção Executar no robô:
a.Clique com o botão direito do mouse no programa (Print3D, neste exemplo)
b.Selecione Executar no robô
c.Clique duas vezes no programa para iniciá-lo (ou clique com o botão direito do mouse e selecione Executar)
Esse método de programação de robôs é útil para fins de depuração; no entanto, para implantar um programa de robô, é melhor gerar o programa off-line, conforme mencionado na seção anterior.
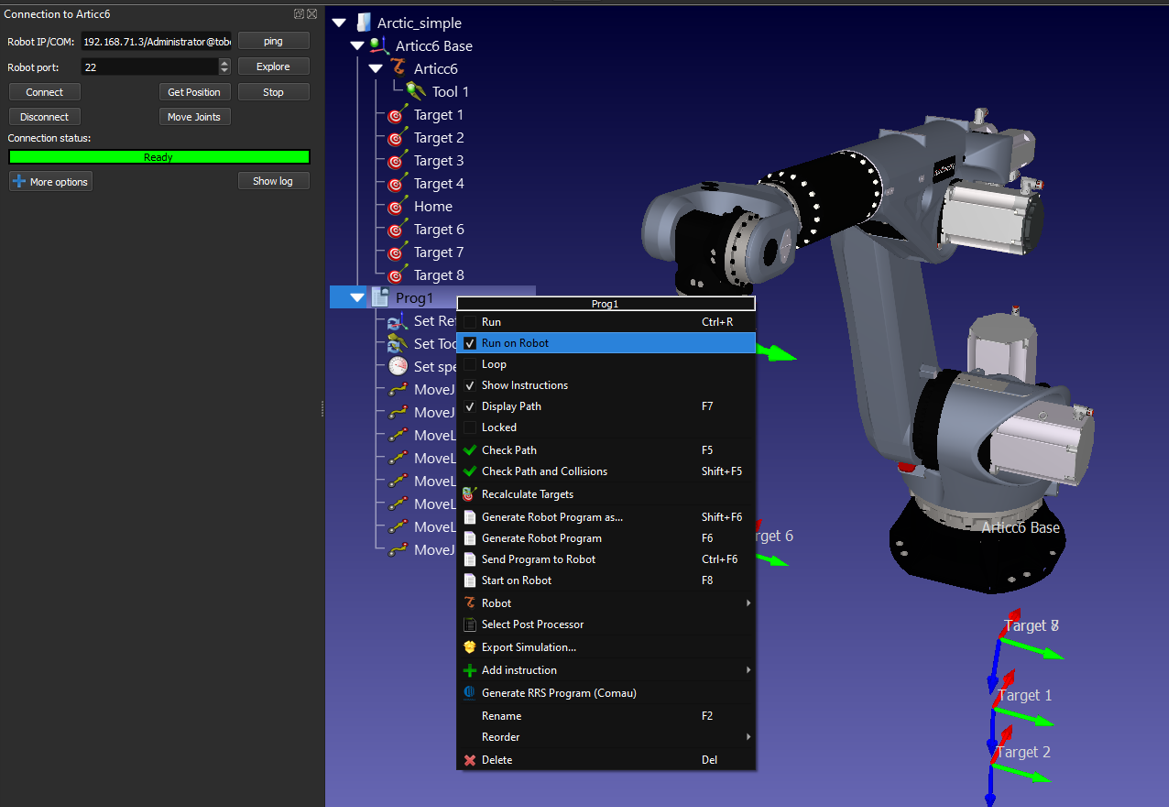
Quando a opção Executar no robô estiver marcada, ele se conectará ao robô real sempre que clicarmos duas vezes em um programa (ou clicarmos com o botão direito do mouse e selecionarmos Executar).
Essas operações também estão disponíveis na API do RoboDK e permitem a integração da programação do robô com outros aplicativos. A API está disponível em Python, C# e outras linguagens de programação.