Controladores KEBA
Você pode programar os controladores KEBA a partir do RoboDK usando dois métodos diferentes: Você pode gerar programas de robôs off-line usando o pós-processador KEBA KAIRO ou usando o driver RoboDK.
Ao usar o pós-processador KEBA KAIRO, você pode obter arquivos KAIRO que podem ser carregados no controlador KEBA usando o RoboDK. Isso é feito usando o pós-processador padrão usado para os robôs KEBA. Além disso, você pode transferir diretamente os arquivos do programa de script usando FTP ou uma unidade USB.
Além disso, ao usar o driver para robôs KEBA, você pode executar programas no robô a partir do RoboDK se o robô estiver conectado ao computador.
Obtenha o IP do controlador KEBA
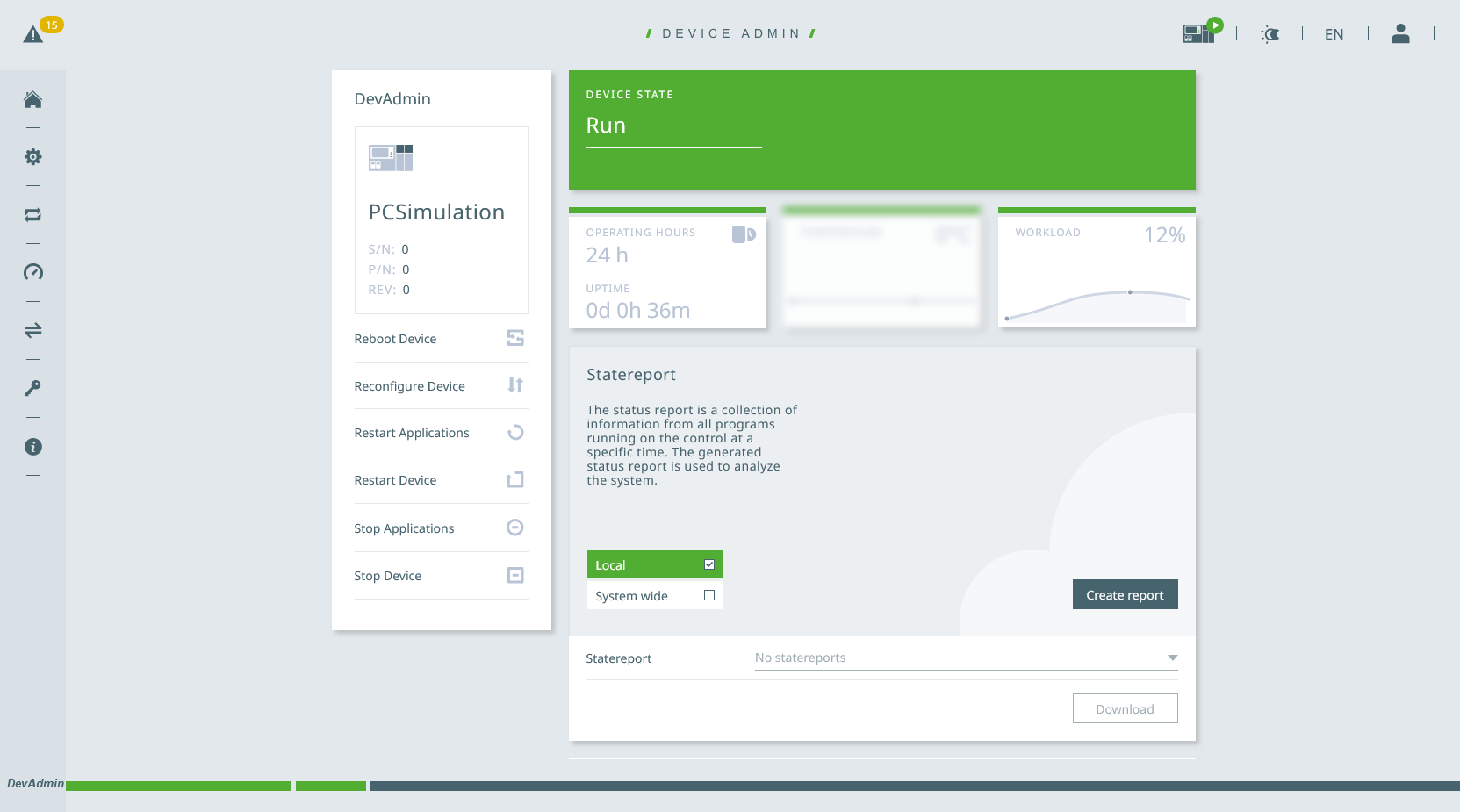
Você precisa do IP do seu controlador KEBA para transferir ou executar automaticamente os programas do RoboDK. Você pode verificar se o IP do seu robô está correto inserindo o IP em um navegador para acessar a interface da Web
Para obter o IP, você pode acessar a janela de serviço no seu pingente de ensino e selecionar a guia de informações.
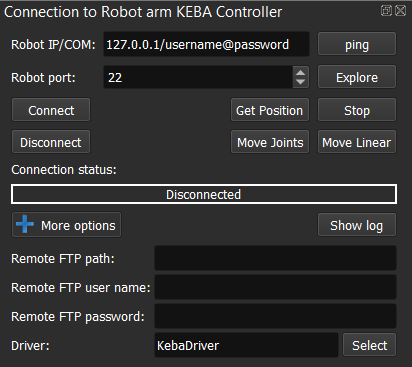
O formato do endereço IP inserido no RoboDK deve conter o nome de usuário e a senha e deve seguir o seguinte formato: .127.0.0.1/username@password
As imagens a seguir mostram como recuperar o IP do controlador a partir do terminal de programação do controlador.



Certifique-se de configurar corretamente uma conexão de rede se não conseguir ver a interface da Web do robô, conforme mostrado na imagem a seguir.
Você também precisará do nome de usuário e da senha usados para fazer login na interface da Web do robô.
Executar um programa no controlador KEBA
Quando a simulação do RoboDK estiver pronta, você pode gerar um programa off-line que pode ser executado pelo controlador do robô KEBA (arquivo KAIRO).
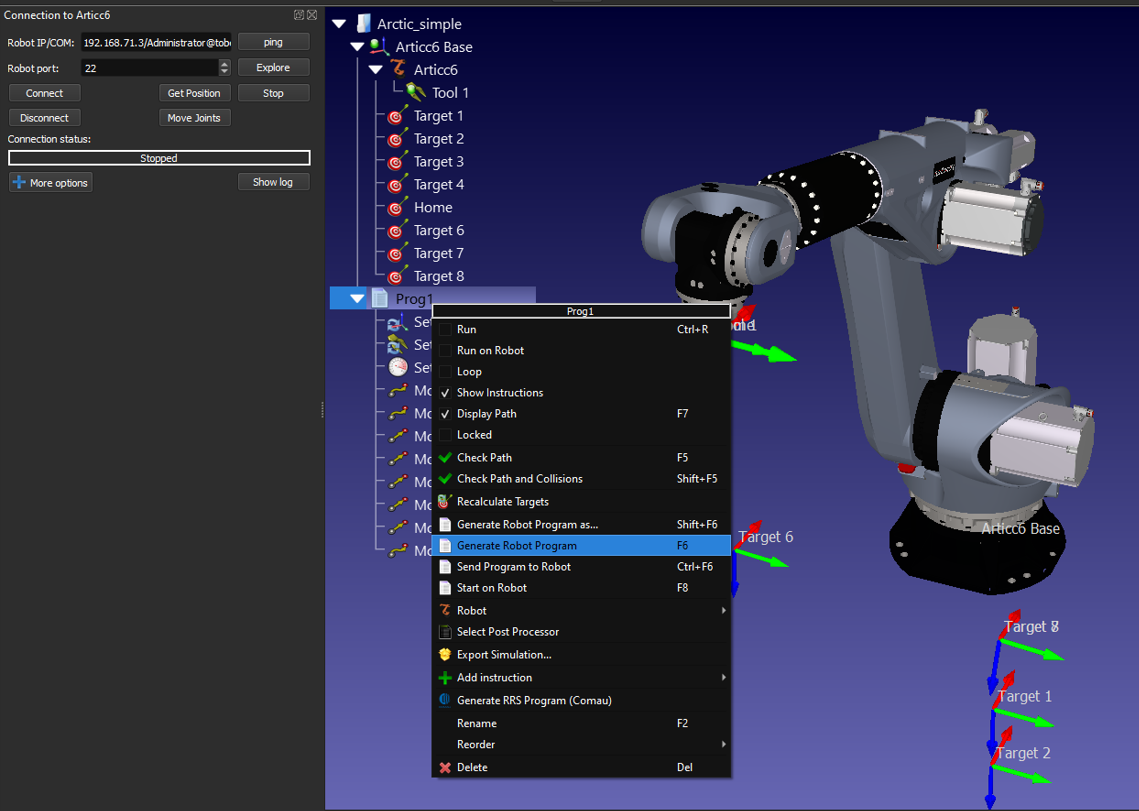
Siga estas etapas para gerar um programa para o seu controlador (arquivo KAIRO) a partir da simulação do robô:
1.Clique com o botão direito do mouse em um programa.
2.Selecione Gerar programa de robô F6. Em seguida, transfira manualmente os arquivos por FTP para o projeto desejado
Como alternativa, selecione Gerar programa de robô Ctrl+F6 depois de configurar o SFTP
3.Na guia Projeto do terminal de programação, pressione Atualizar
4.Carregar o programa e, em seguida, carregar o arquivo principal

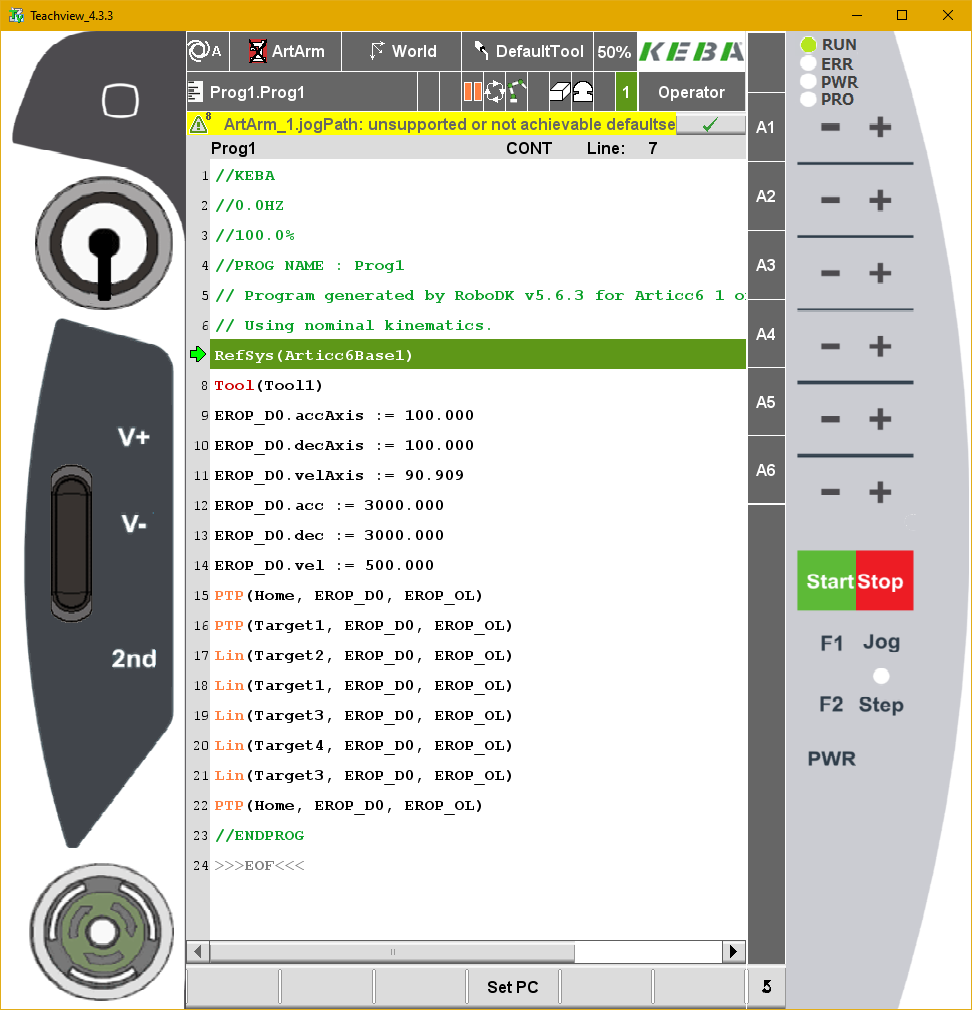
O programa será exibido em um editor de texto. Para obter mais informações sobre como gerar programas a partir do RoboDK, consulte a seção de programas do robô na documentação.
Executar o programa do RoboDK
Os drivers do robô oferecem uma alternativa à programação off-line (em que um programa é gerado e, em seguida, transferido para o robô e executado). Você pode executar uma simulação do RoboDK diretamente no robô (Programação Online). Mais informações sobre os drivers estão disponíveis na seção Robot Drivers.
Siga estas etapas para se conectar ao robô a partir do RoboDK:
1.Clique com o botão direito do mouse no robô no RoboDK.
2.Selecione: 
3.Digite o IP do robô.
4.Selecione Conectar.
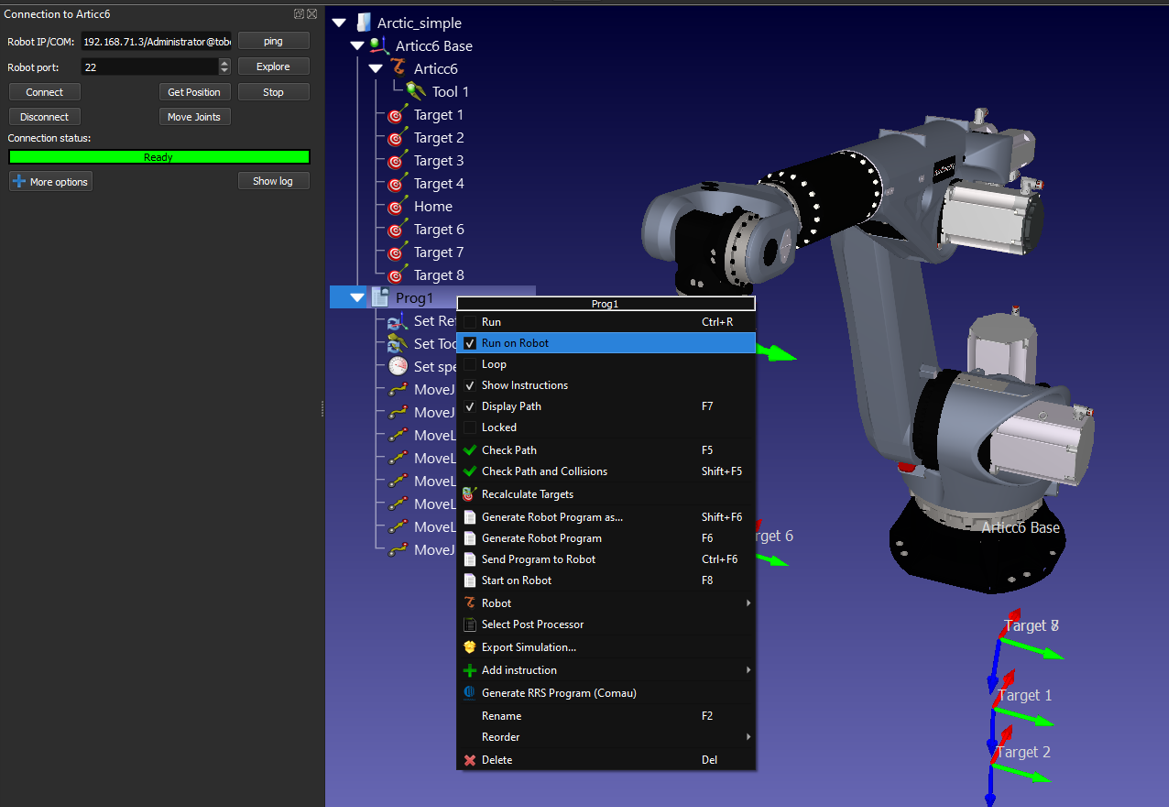
Deve haver uma mensagem verde exibindo Pronto se a conexão foi bem-sucedida. Caso contrário, verifique se o IP, o nome de usuário e a senha estão corretos. Além disso, certifique-se de formatar corretamente o endereço IP no RoboDK, conforme mencionado nas seções anteriores (127.0.0.1/username@password).
O robô pode ser movido selecionando Obter posições de eixo do robô no menu de conexão, movimentar o robô e clicar em Mover eixos para mover o robô no menu de conexão.
Para executar programas do PC diretamente no robô, você deve ativar a opção Executar no robô em seus programas. As etapas a seguir descrevem como ativar a opção Executar no robô:
a.Clique com o botão direito do mouse no programa (Print3D, neste exemplo)
b.Selecione Executar no robô
c.Clique duas vezes no programa para iniciá-lo (ou clique com o botão direito do mouse e selecione Executar)
Esse método de programação de robôs é útil para fins de depuração; no entanto, para implantar um programa de robô, é melhor gerar o programa off-line, conforme mencionado na seção anterior.
Quando a opção Executar no robô estiver marcada, ele se conectará ao robô real sempre que clicarmos duas vezes em um programa (ou clicarmos com o botão direito do mouse e selecionarmos Executar).
Essas operações também estão disponíveis na API do RoboDK e permitem a integração da programação do robô com outros aplicativos. A API está disponível em Python, C# e outras linguagens de programação.
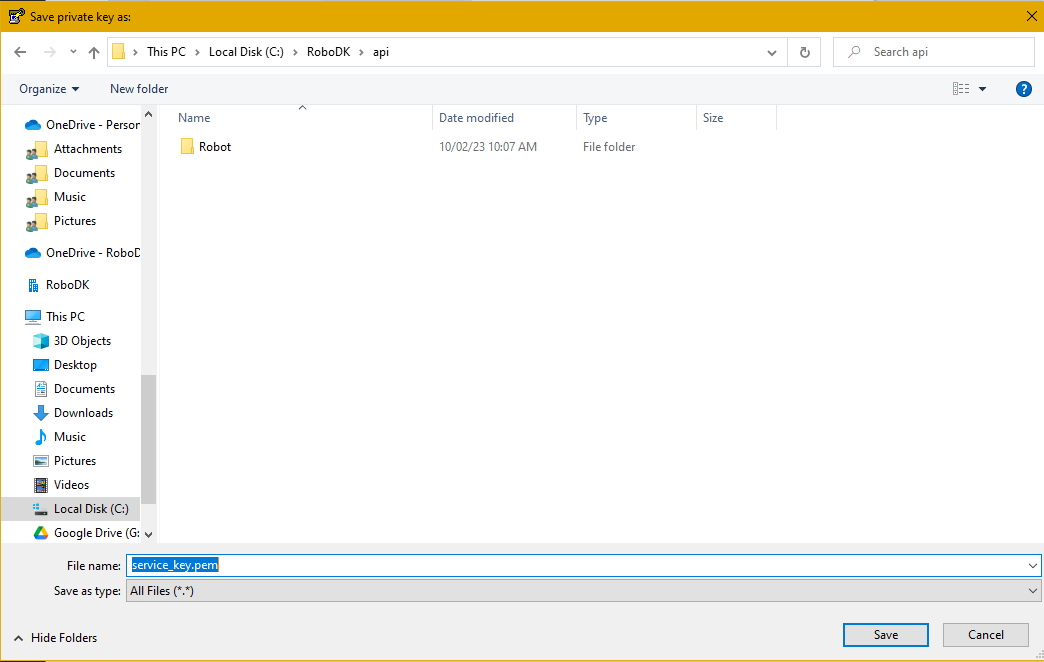
Uso do arquivo PPK para SFTP
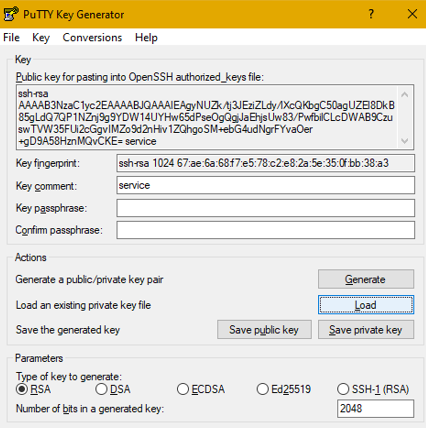
Em vez de usar o nome de usuário e a senha para transferir arquivos, você também pode usar um arquivo de chave. Para isso, você precisará converter o arquivo PPK fornecido pela KEBA que acompanha o robô em um arquivo PEM. Isso pode ser feito com o puttygen, um utilitário que vem instalado com o putty.
No puttygen, carregue o arquivo de chave selecionando Load. Em seguida, clique no menu suspenso Conversions (Conversões) e selecione Export open SSH Key (forçar novo formato de arquivo).
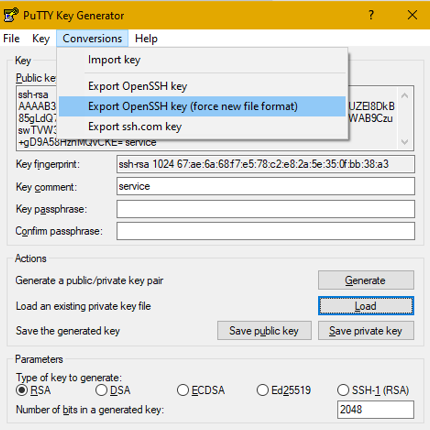
Dê um nome ao service_key.pem e salve o arquivo na pasta da API do RoboDK, que está localizada em C:\RoboDK\api por padrão.