Comportamento do pós-processador
Ao gerar programas de robô para os controladores de robô KUKA KRC, Você pode definir os sistemas de coordenadas ($BASE) e as ferramentas ($TOOL) com as mesmas coordenadas inseridas no RoboDK ou sistemas de coordenadas numeradas e ferramentas numeradas, respectivamente.
Por padrão, o RoboDK exporta a pose completa (valores XYZABC) da sua ferramenta e o sistema de coordenadas da mesma forma que Você os inseriu no RoboDK. O código a seguir mostra um exemplo do que o RoboDK gera para um programa de robô KUKA SRC:
; ---- Setting tool (TCP) ----------
; TOOL_DATA[3]={FRAME: X 116.058,Y 0.0,Z 219.481,A 0.0,B 60.0,C 0.0}
$TOOL = {FRAME: X 116.058,Y 0.0,Z 219.481,A 0.0,B 60.0,C 0.0}
; $TOOL=TOOL_DATA[3]
; ----------------------------------
; ---- Setting reference (Base) ----
; BASE_DATA[1]={FRAME: X 640.289,Y -290.0,Z 0.0,A 90.0,B 0.0,C 0.0}
$BASE = {FRAME: X 640.289,Y -290.0,Z 0.0,A 90.0,B 0.0,C 0.0}
; $BASE = BASE_DATA[1]
; ----------------------------------
Por outro lado, se preferir vincular sua ferramenta (variável $TOOL) e o sistema de coordenadas (variável $BASE) a ferramentas e frames de referência numerados, Você pode alterar as seguintes variáveis no pós-processador:
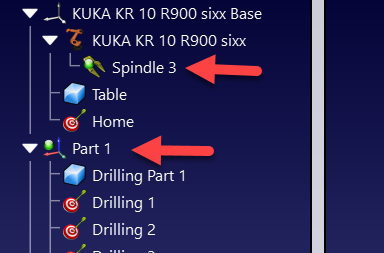
●FRAME_INDEX: Defina essa variável como True para vincular seu sistema de coordenadas a um frame de base numerado. Você deve certificar-se de que o frame de referência tenha um número na estação do RoboDK, conforme mostrado na imagem a seguir.
●TOOL_INDEX: defina essa variável como True para vincular sua ferramenta a uma ferramenta numerada. Você deve se certificar de que sua ferramenta tenha um número na estação RoboDK, conforme mostrado na imagem a seguir.