Configuração automática
Pré-requisitos: RoboDK versão 5.5.2 ou superior, sistema operacional Windows, caminho de instalação C:\RoboDK.
1.Abra o shell de comando com INICIAR ➔ Todos os programas➔ Acessórios➔ Prompt de comando
ou INICIAR ➔ Executar➔ cmd.
2.Altere o diretório para C:\RoboDK\bin e inicie o kukabridge.exe executando os seguintes comandos:
c:
cd C:\RoboDK\bin
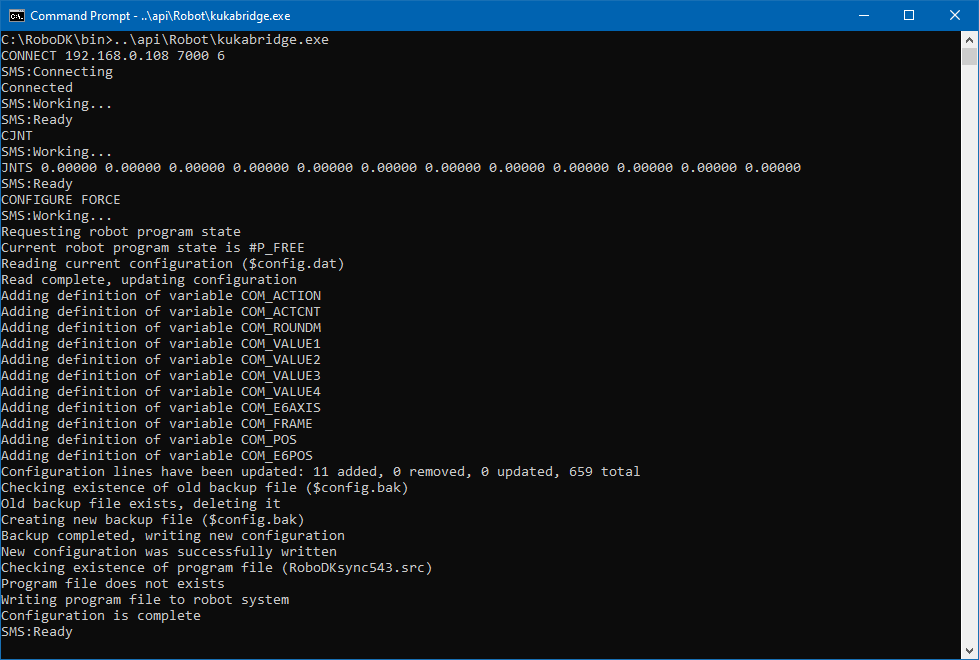
..\api\Robot\kukabridge.exe
3.Agora o KUKA Bridge Driver está sendo executado no modo interativo.
4.Estabeleça uma conexão com o sistema de controle digitando CONNECT <endereço IP do robô> <porta> <número de eixos do robô>, por exemplo:
CONNECT 172.1.1.10 7000 6
5.Se for bem-sucedido, você verá o seguinte resultado:
SMS:Connecting
Connected
SMS:Working...
SMS:Ready
6.Solicite a posição atual da articulação do robô digitando o comando CJNT:
CJNT
SMS:Working...
JNTS 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000
SMS:Ready
7.Execute a configuração automática com o comando CONFIGURE FORCE:
CONFIGURE FORCE
SMS:Working...
Requesting robot program state
Current robot program state is #P_FREE
Reading current Configuração ($config.dat)
Read complete, updating Configuração
Adding definition of variable COM_ACTION
Adding definition of variable COM_ACTCNT
Adding definition of variable COM_ROUNDM
Adding definition of variable COM_VALUE1
Adding definition of variable COM_VALUE2
Adding definition of variable COM_VALUE3
Adding definition of variable COM_VALUE4
Adding definition of variable COM_E6AXIS
Adding definition of variable COM_FRAME
Adding definition of variable COM_POS
Adding definition of variable COM_E6POS
Configuração lines have been updated: 11 added, 0 removed, 0 updated, 659 total
Checking existence of old backup file ($config.bak)
Old backup file exists, deleting it
Creating new backup file ($config.bak)
Backup completed, writing new Configuração
New Configuração was successfully written
Checking existence of program file (RoboDKsync543.src)
Program file does not exists
Writing program file to robot system
Configuração is complete
SMS:Ready
8.Agora seu robô está pronto para funcionar, tudo o que você precisa fazer é selecionar e executar o programa RoboDKsync543.src.