Driver RoboDK para KUKA
Os drivers de robô oferecem uma alternativa à programação off-line (em que um programa é gerado e, em seguida, transferido para o robô e executado). Com os drivers de robô, é possível executar uma simulação diretamente no robô (Programação on-line). Mais informações estão disponíveis na seção Drivers de Robô.
Você pode estabelecer uma conexão entre o RoboDK e o seu controlador KUKA para mover o robô automaticamente a partir do seu computador. Isso permite que você use a opção RoboDK Executar no Robô para programação e depuração on-line. A conexão pode ser estabelecida por meio de uma conexão Ethernet padrão (TCP/IP).
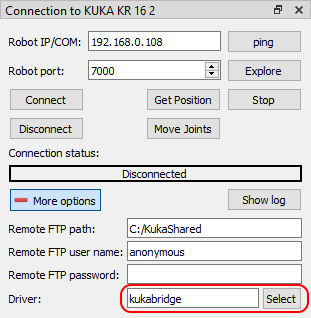
Se Você não usar uma versão recente do RoboDK, poderá estar usando o driver legado (apikuka, baseado no projeto KUKAVARPROXY). Para usar o driver atual, certifique-se de que o driver kukabridge esteja selecionado na seção Mais opções da janela Conexão com o robô.
Siga estas etapas para configurar o driver do RoboDK para a KUKA:
1.Obtenha o arquivo do instalador do C3 Bridge (executável c3setup) neste link.
2.Usando a KUKA HMI, copie o arquivo de instalação c3setup.exe para a área de trabalho do seu controlador ou para uma pasta do sistema de controle.
3.Conecte um mouse (opcional, mas recomendado).
É possível plug-in de dispositivos USB no terminal de programação ou no controlador (não é necessário reinicializar).
Como alternativa, é possível estabelecer uma conexão de área de trabalho remota.
Essas etapas também podem ser realizadas usando a tela sensível ao toque do terminal de programação e o teclado virtual.
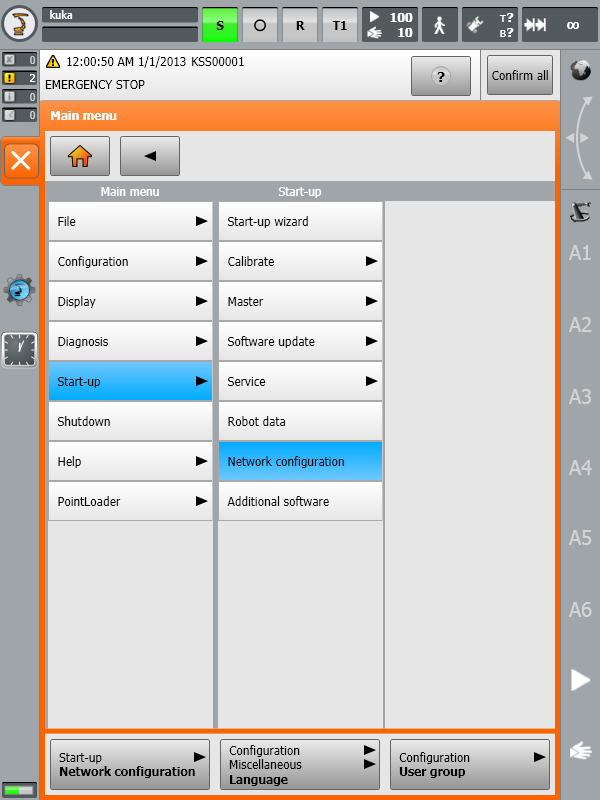
4.Usando o aplicativo KUKA HMI, é possível abrir o menu principal usando o botão KUKA
a.
b.
5.Localize o arquivo c3setup-1.6.1.exe copiado anteriormente e execute-o. Siga as instruções do instalador.
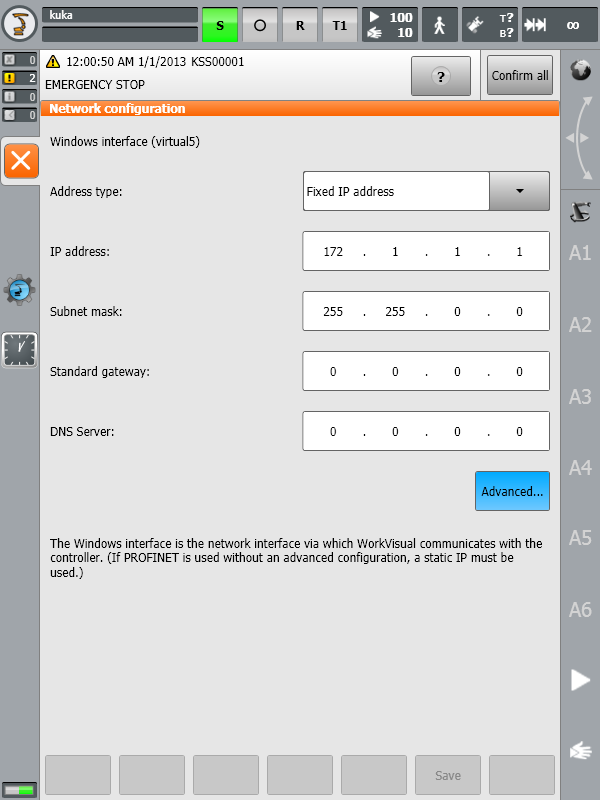
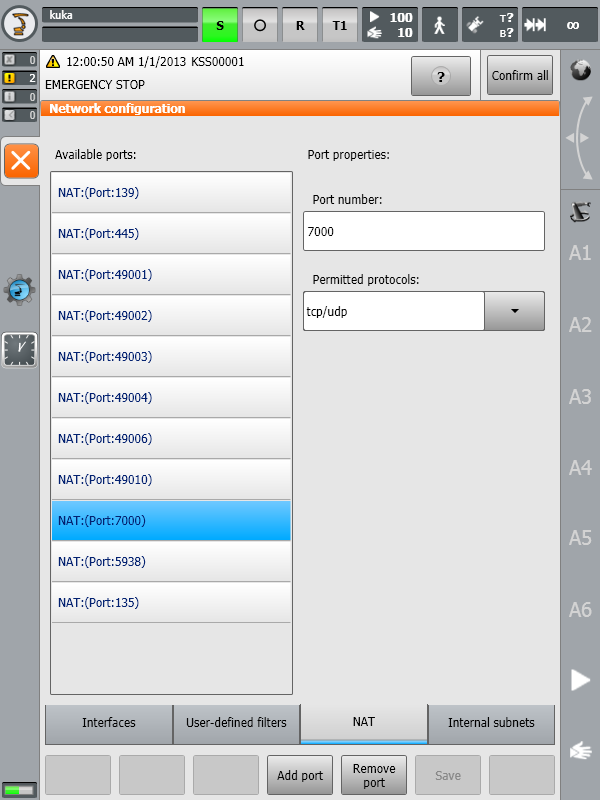
6.Permitir a porta 7000 (ou outra porta se a porta 7000 estiver ocupada, consulte a nota abaixo) para comunicação TCP/UDP (esta etapa não é necessária nos controladores KUKA KRC2):
a.Restaurar a HMI.
b.
c.NAT➔ Adicionar porta➔ Número da porta 7000
d.Definir protocolos permitidos: TCP/UDP
7.Inicie o C3 Bridge Server a partir do atalho na área de trabalho ou do item do menu Iniciar (Você pode pular esta etapa caso tenha selecionado Run C3 Bridge Server na última etapa da instalação).
8.Para iniciar o C3 Bridge Server automaticamente na inicialização do sistema, copie o atalho do aplicativo da área de trabalho para a pasta INICIARup do menu Iniciar.
O C3 Bridge Server já está pronto. Você pode deixar esse programa em execução. Esse servidor permite que você troque valores de variáveis globais entre o sistema de controle KUKA e o PC remoto, faça download e upload de programas KRL, controle a execução de programas KRL e muito mais.
A configuração adicional do sistema de controle pode ser feita de duas maneiras: automaticamente, usando o modo interativo do driver kukabridge (somente KRC4) e manualmente, editando os arquivos do sistema de controle do robô no KUKA HMI. Vamos dar uma olhada nas duas abordagens.
Alteração do número da porta do C3 Bridge Server
O C3 Bridge Server armazena suas configurações no Registro do Windows. Siga estas etapas para alterar a porta de rede:
1.Encerrar o servidor C3 Bridge.
2.Abra o Registry Editor e navegue até HKEY_CURRENT_USER\SOFTWARE\C3 Bridge Interface.
3.Altere o valor da chave NetworkTcpPort para um valor diferente de 7000 (por exemplo, 7001).
4.Inicie o C3 Bridge Server novamente e repita a etapa 6 da seção anterior (abra o acesso à porta apropriada).
As versões mais recentes do C3 Bridge Server (1.7.1 e superiores) oferecem suporte a opções de linha de comando. Em particular, a porta do servidor pode ser alterada executando-se o aplicativo com o parâmetro -tcpPort. Por exemplo:
c3bridge.exe -tcpPort 7001
Configuração automática usando um script
O script KUKA_Auto_Configuração.py na pasta C:\RoboDK\Library\Scripts pode ser usado para realizar a configuração automática do sistema de controle KUKA. Nesse caso, a estação atual do RoboDK deve conter pelo menos um robô KUKA com o endereço IP e a porta corretos na janela Conexão com o Robô. O script pode ser chamado no menu Tools (Ferramentas)➔ Run Script (Executar script) ou pela tecla de atalho Shift+S.
Configuração automática
Pré-requisitos: RoboDK versão 5.5.2 ou superior, sistema operacional Windows, caminho de instalação C:\RoboDK.
1.Abra o shell de comando com INICIAR ➔ Todos os programas➔ Acessórios➔ Prompt de comando
ou INICIAR ➔ Executar➔ cmd.
2.Altere o diretório para C:\RoboDK\bin e inicie o kukabridge.exe executando os seguintes comandos:
c:
cd C:\RoboDK\bin
..\api\Robot\kukabridge.exe
3.Agora o KUKA Bridge Driver está sendo executado no modo interativo.
4.Estabeleça uma conexão com o sistema de controle digitando CONNECT <endereço IP do robô> <porta> <número de eixos do robô>, por exemplo:
CONNECT 172.1.1.10 7000 6
5.Se for bem-sucedido, você verá o seguinte resultado:
SMS:Connecting
Connected
SMS:Working...
SMS:Ready
6.Solicite a posição atual da articulação do robô digitando o comando CJNT:
CJNT
SMS:Working...
JNTS 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000
SMS:Ready
7.Execute a configuração automática com o comando CONFIGURE FORCE:
CONFIGURE FORCE
SMS:Working...
Requesting robot program state
Current robot program state is #P_FREE
Reading current Configuração ($config.dat)
Read complete, updating Configuração
Adding definition of variable COM_ACTION
Adding definition of variable COM_ACTCNT
Adding definition of variable COM_ROUNDM
Adding definition of variable COM_VALUE1
Adding definition of variable COM_VALUE2
Adding definition of variable COM_VALUE3
Adding definition of variable COM_VALUE4
Adding definition of variable COM_E6AXIS
Adding definition of variable COM_FRAME
Adding definition of variable COM_POS
Adding definition of variable COM_E6POS
Configuração lines have been updated: 11 added, 0 removed, 0 updated, 659 total
Checking existence of old backup file ($config.bak)
Old backup file exists, deleting it
Creating new backup file ($config.bak)
Backup completed, writing new Configuração
New Configuração was successfully written
Checking existence of program file (RoboDKsync543.src)
Program file does not exists
Writing program file to robot system
Configuração is complete
SMS:Ready
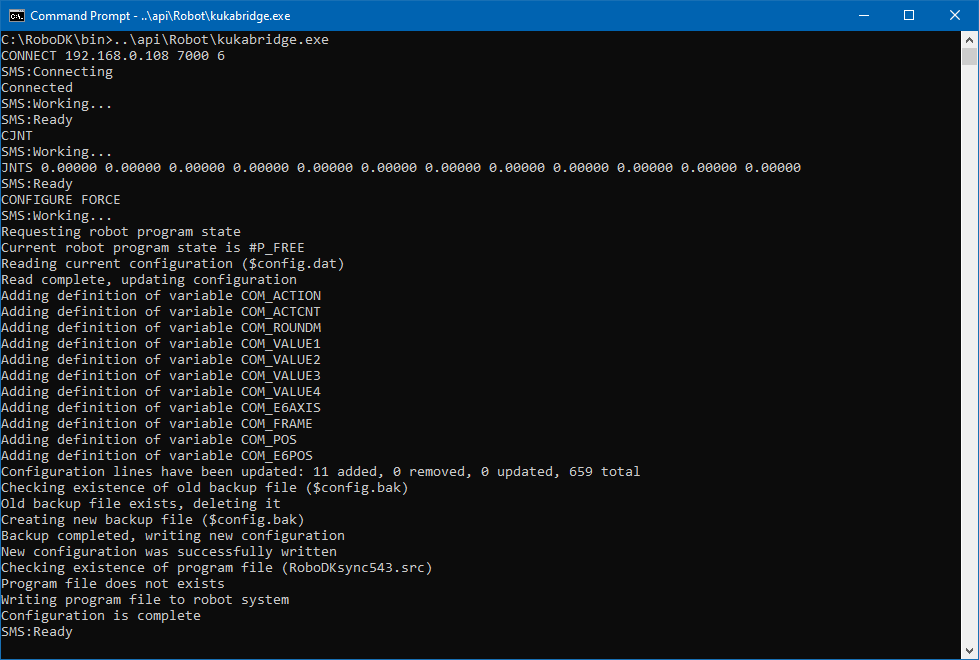
8.Agora seu robô está pronto para funcionar, tudo o que você precisa fazer é selecionar e executar o programa RoboDKsync543.src.
Configuração manual
As próximas etapas consistem em configurar manualmente o programa principal que tratará dos movimentos do robô:
1.Add-in a declaração das seguintes variáveis globais:
Para isso, localize e modifique o arquivo "KRC:\R1\SYSTEM\$CONFIG.DAT" por meio da KUKA HMI. A pasta "KRC:\R1\" também pode ser acessada a partir da unidade C:\ no seguinte caminho do Windows: "C:\KRC\ROBOTER\KRC\".
INT COM_ACTION=0
INT COM_ACTCNT=0
REAL COM_ROUNDM=0
REAL COM_VALUE1=0
REAL COM_VALUE2=0
REAL COM_VALUE3=0
REAL COM_VALUE4=0
DECL E6AXIS COM_E6AXIS
DECL FRAME COM_FRAME
DECL POS COM_POS
DECL E6POS COM_E6POS
2.Copie o programa RoboDKsyncVER.src da KUKA SRC para a pasta KRC\R1\PROGRAM. O sufixo VER no nome do arquivo indica a versão do programa (por exemplo, RoboDKsync543.src).
3.Inicie manualmente o programa RoboDKsyncVER.src para fazer com que o robô ouça os comandos provenientes do computador.
Se o programa RoboDKsyncVER.src não estiver em execução, o RoboDK ainda será capaz de ler as articulações do robô se o C3 Bridge Server estiver em execução no controlador do robô.