Solução de problemas
Esta seção explica como determinar, diagnosticar e corrigir problemas que Você pode encontrar ao usar os drivers do robô KUKA com o RoboDK.
Verificação da disponibilidade da porta 7000
Você deve entrar no grupo de usuários Perito no controlador KUKA para solucionar problemas com a porta 7000.
1.
2.
3.Abra o shell de comando com START➔ All programs➔ Accessories➔ Command
ou START➔ Executar➔ cmd
4.Solicite uma lista de todas as conexões e portas de escuta usando o comando:
netstat -a -b -n -o -p TCP | findstr :7000
5.Se a resposta não contiver nenhuma cadeia de caracteres, então a porta 7000 está livre e pode ser usada para a operação do driver. As etapas subsequentes podem ser ignoradas.
6.Se a resposta ao comando da etapa 4 fosse assim:
TCP 0.0.0.0:7000 0.0.0.0:0 LISTENING 1840
7.O último número na linha acima é o identificador de processo (PID). Ele pode ser usado para obter informações sobre o nome do processo usando o seguinte comando (Você deve usar o seu número em vez de 1840):
tasklist /fi "PID eq 1840"
8.O resultado do comando tasklist contém informações sobre o processo que está escutando na porta 7000. Exemplo de saída:
Image Name PID Session Name Session# Mem Usage
========================= ======== ================ =========== ============
c3bridge.exe 1840 Console 1 5,912 K
9.Se a porta estiver ocupada pelos processos KukavarProxy.exe ou c3bridge.exe, o sistema estará pronto para trabalhar com o driver selecionado. Se a porta estiver ocupada por algum outro aplicativo, será necessário encerrá-lo ou alterar o número da porta do C3 Bridge Server.
Desinstalação do driver legado
Se Você estiver usando o KUKAVARPROXY e quiser atualizar para o C3 Bridge Server, não é necessário nenhum procedimento específico de desinstalação. Minimize a KUKA HMI, feche o KUKAVARPROXY e certifique-se de que ele não seja carregado automaticamente na inicialização do sistema (nenhum atalho em INICIAR➔ Todos os programas➔ INICIARup). Não é necessário excluir o arquivo executável do KUKAVARPROXY.
Erro de configuração
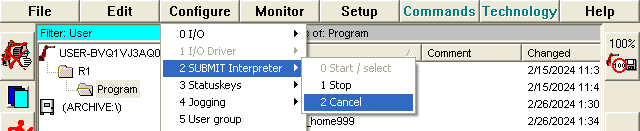
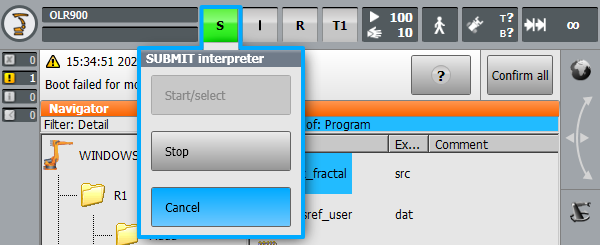
Os procedimentos de configuração automática ou manual do sistema de controle podem falhar. Na maioria das vezes, isso se deve à incapacidade de substituir o arquivo $config.dat. Esse arquivo só pode ser editado por um usuário com privilégios avançados (Perito). Uma condição adicional é interromper todos os interpretadores: robot e submit. Para interromper o interpretador do robô, basta cancelar qualquer programa selecionado ou selecionar nenhum programa se o sistema de controle tiver acabado de ser carregado. Para cancelar o interpretador de envio, use a HMI conforme mostrado nas figuras abaixo para os sistemas KRC2 e KRC4, respectivamente:
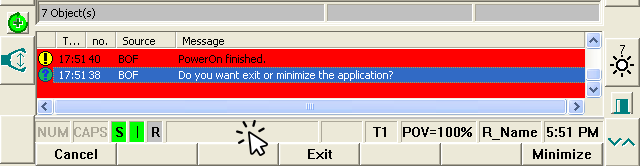
Caso o arquivo $config.dat ainda esteja bloqueado após a interrupção de todos os interpretadores, você pode interromper completamente a execução da parte do software do sistema de controle do robô. No sistema KRC2, clique na área retangular ao lado dos indicadores de status (S I R) e clique no botão Exit (Sair):
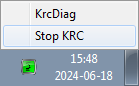
No sistema KRC4, clique no ícone verde do robô na área da bandeja e selecione Stop KRC:
Depois de parar o software de controle, o arquivo C:\KRC\ROBOTER\KRC\R1\System\$config.dat pode ser modificado usando qualquer editor de texto. Execute uma reinicialização do sistema operacional para aplicar as alterações.