Visualizando as posições de eixos do robô
As etapas a seguir permitem que você veja as posições de eixos do robô:
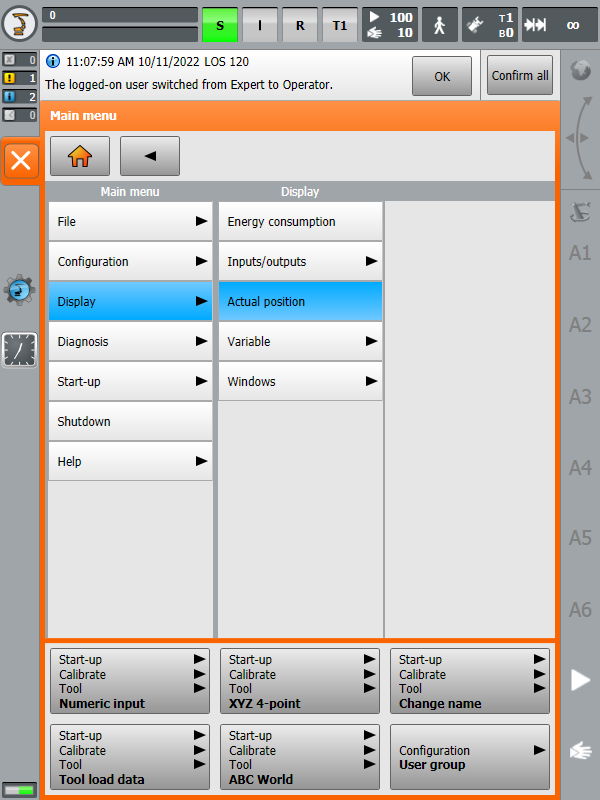
1.Selecionar
2.Selecione o modo Específico do eixo e use a coluna da esquerda para obter as articulações do robô
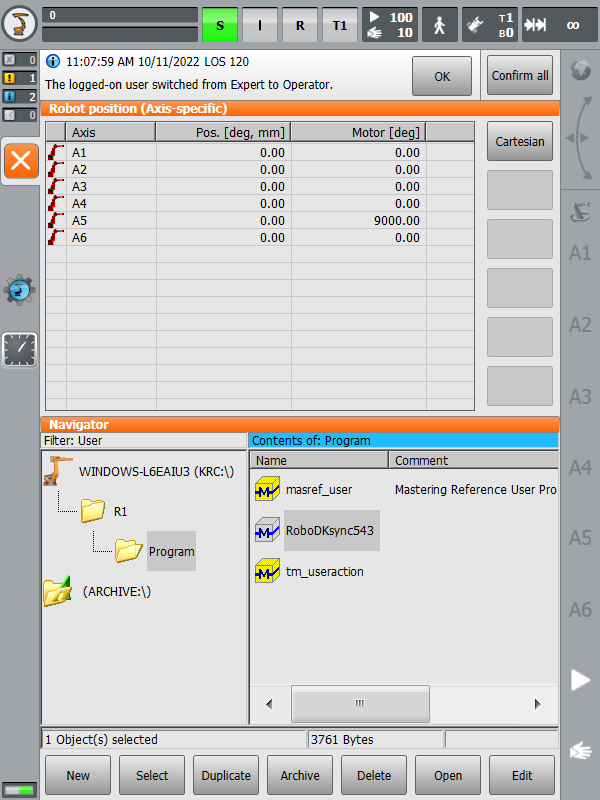
Dica: É possível recuperar as posições de eixos do robô com mais precisão (precisão de 5 decimais) monitorando a variável $AXIS_ACT ou simplesmente usando o driver do robô RoboDK para a KUKA e selecionando o botão Get robot joints (Obter posições de eixos do robô)