Executar um programa no controlador Mecademic
Quando a simulação do RoboDK estiver pronta, você pode gerar um programa off-line que pode ser executado pelo controlador do robô Mecademic (arquivo de script). Você também pode gerar um arquivo PY que executará o programa no controlador do robô a partir de um computador remoto.
Siga estas etapas para gerar um programa off-line (um script ou um arquivo PY) a partir da simulação do robô:
1.Clique com o botão direito do mouse em um programa (Prog1, neste exemplo)
2.Selecione Gerar programa do robô F6
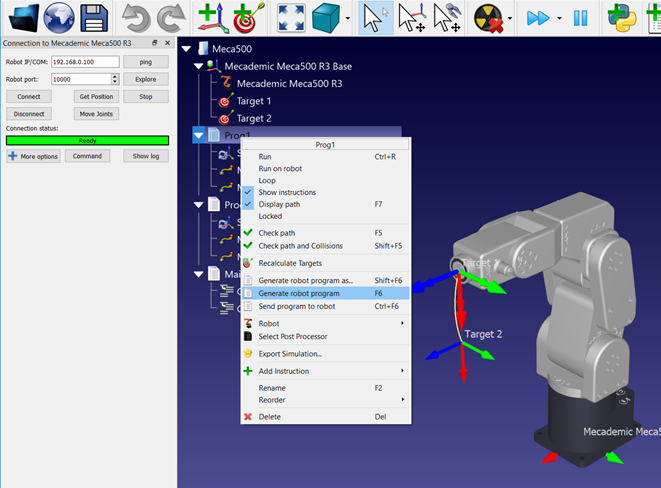
O programa será exibido em um editor de texto (esse comportamento pode ser alterado no menu: Ferramentas ➔ Opções ➔ Programa).
Como carregar um arquivo de script
Depois de obter um arquivo de programa/script, você pode executar o programa ou carregá-lo no controlador usando a interface Web. Siga estas etapas para executar o programa usando a interface Web do Mecademic:
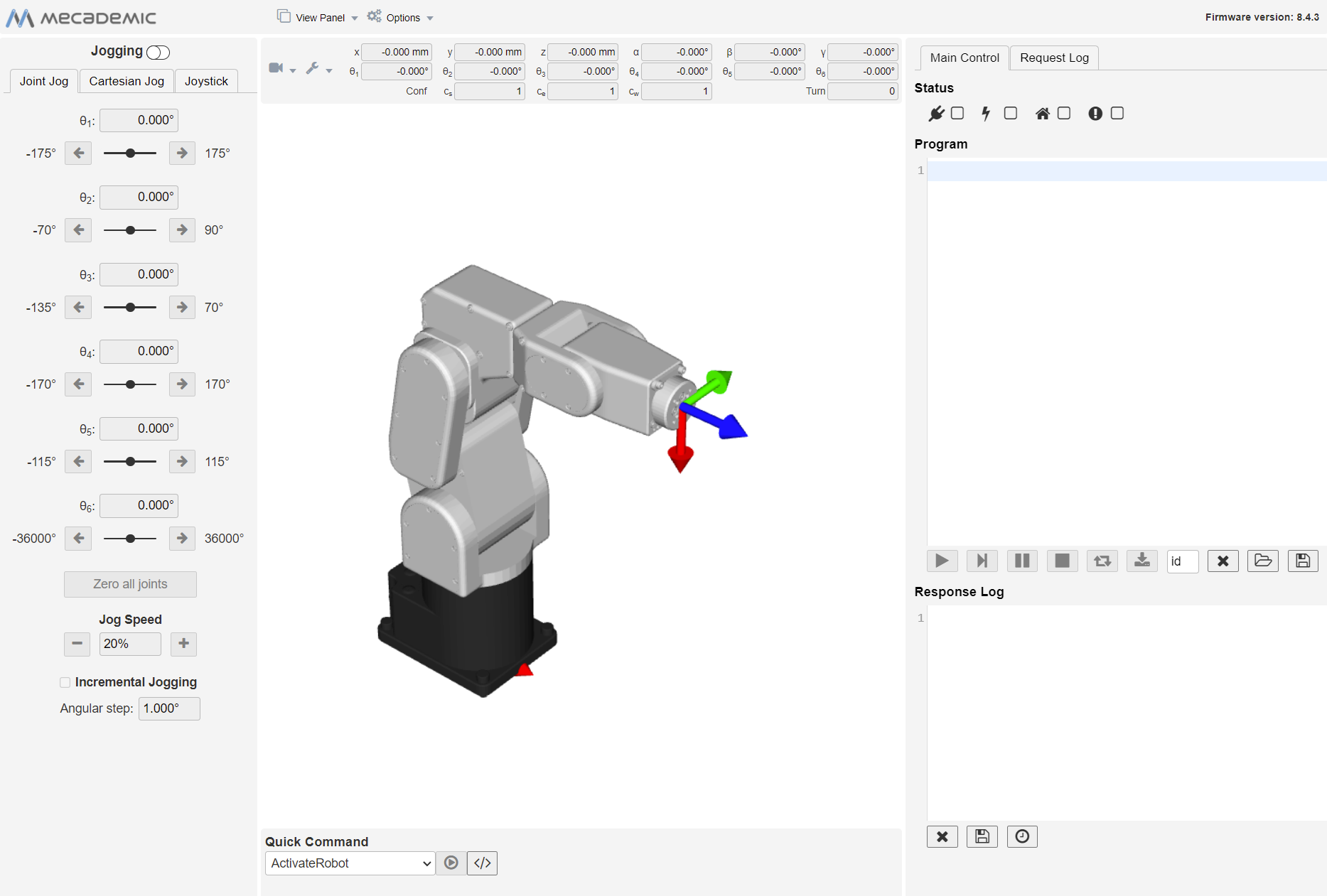
1.Abra a interface web do Mecademic em seu navegador (digite o endereço IP do robô).
2.Copie e cole o conteúdo do script no editor de programas.
3.Na barra de status, conecte, ative e coloque o robô em home.
4.Clique no botão play para executar o programa.
5.Clique no botão Salvar para fazer o upload do programa para o robô.
Como executar um arquivo PY
Você pode gerar um arquivo Python que se conecta automaticamente ao robô Mecademic usando a interface TCP/IP do Mecademic e executa o programa remotamente.
Você deve selecionar o pós-processador chamado Mecademic Python. As etapas a seguir resumem o procedimento para executar um arquivo PY no Mecademic.
1.Clique com o botão direito do mouse no programa e selecione Seleccionar Pós-processador
2.Selecione Mecademic Python
3.Clique com o botão direito do mouse no programa e selecione Gerar programa do robô (F6)
4.Salve o arquivo PY gerado no disco.
5.Abra e execute o arquivo PY em seu IDE ou execute-o diretamente em seu ambiente Python.