Mecademic
Você pode programar os robôs Mecademic usando três métodos diferentes: usando arquivos de script Mecademic que são executados no controlador Mecademic, usando arquivos PY que são executados externamente ou usando o driver RoboDK.
1.Arquivos de script: Você pode gerar scripts que podem ser carregados no controlador Mecademic usando o RoboDK. Isso é feito usando o pós-processador padrão usado para os robôs Mecademic. Você pode copiar diretamente os programas de script usando a interface Web do Mecademic.
2.Arquivos PY: Você pode gerar um arquivo Python que se conecta automaticamente ao robô Mecademic usando a interface TCP do Mecademic e executa o programa remotamente. Você deve selecionar o pós-processador chamado Mecademic Python.
3.Programação on-line: O RoboDK pode carregar seu programa como um programa off-line (até 500) na memória do robô. Esses programas off-line podem ser chamados a partir de qualquer outro método.
Com o RoboDK, você pode gerar programas off-line, arquivos de scripts e arquivos PY que podem ser executados por um robô Mecademic. Além disso, é possível executar programas no robô a partir do RoboDK se o robô estiver conectado ao computador.
Recupere o IP do robô Mecademic
Você precisa do IP do seu robô Mecademic para executar ou transferir programas do RoboDK. Os robôs Mecademic usam o IP 192.168.0.100 por padrão. Você pode verificar se o IP do seu robô está correto digitando o IP em um navegador para acessar a interface Web
Certifique-se de configurar corretamente uma conexão de rede se não conseguir ver a interface Web do robô, conforme mostrado na imagem a seguir.
Executar um programa no controlador Mecademic
Quando a simulação do RoboDK estiver pronta, você pode gerar um programa off-line que pode ser executado pelo controlador do robô Mecademic (arquivo de script). Você também pode gerar um arquivo PY que executará o programa no controlador do robô a partir de um computador remoto.
Siga estas etapas para gerar um programa off-line (um script ou um arquivo PY) a partir da simulação do robô:
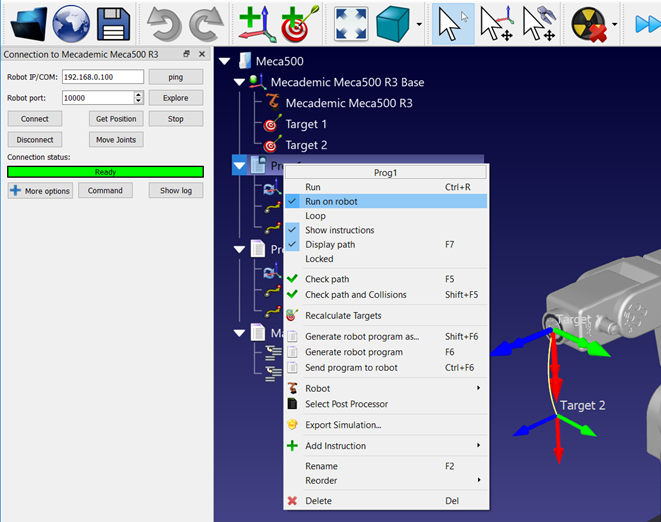
1.Clique com o botão direito do mouse em um programa (Prog1, neste exemplo)
2.Selecione Gerar programa do robô F6
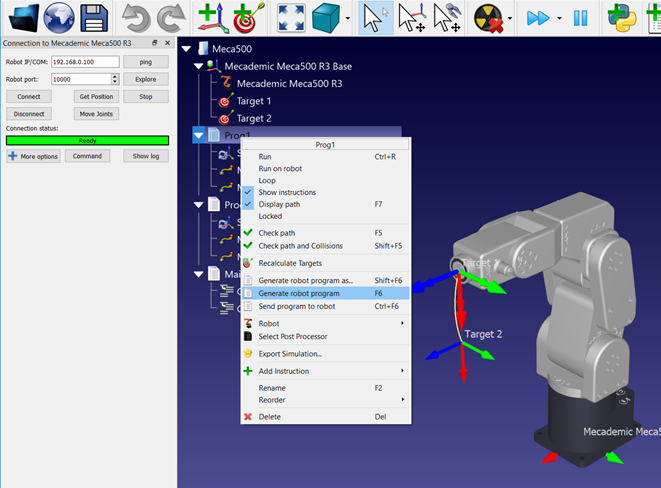
O programa será exibido em um editor de texto (esse comportamento pode ser alterado no menu: Ferramentas ➔ Opções ➔ Programa).
Como carregar um arquivo de script
Depois de obter um arquivo de programa/script, você pode executar o programa ou carregá-lo no controlador usando a interface Web. Siga estas etapas para executar o programa usando a interface Web do Mecademic:
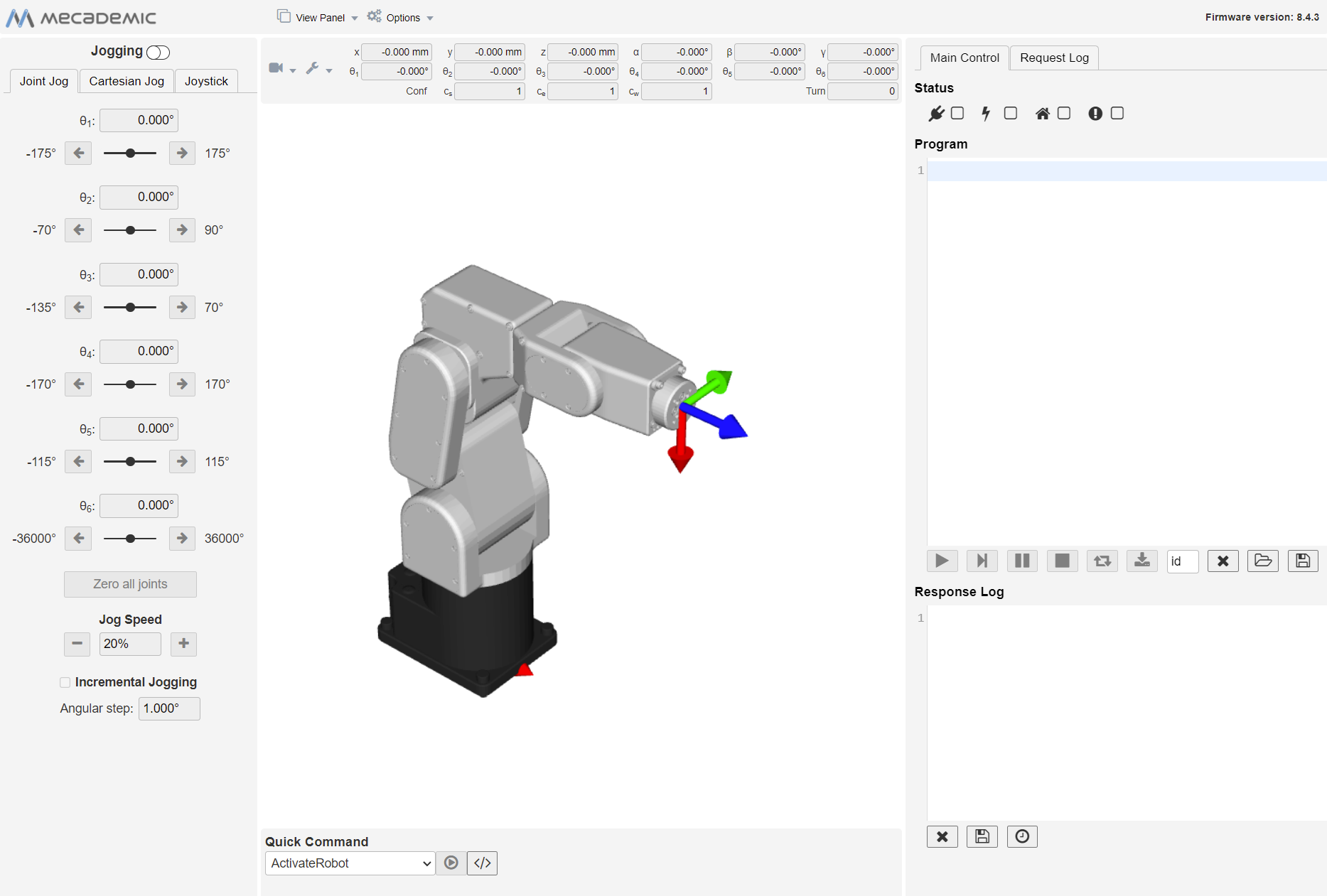
1.Abra a interface web do Mecademic em seu navegador (digite o endereço IP do robô).
2.Copie e cole o conteúdo do script no editor de programas.
3.Na barra de status, conecte, ative e coloque o robô em home.
4.Clique no botão play para executar o programa.
5.Clique no botão Salvar para fazer o upload do programa para o robô.
Como executar um arquivo PY
Você pode gerar um arquivo Python que se conecta automaticamente ao robô Mecademic usando a interface TCP/IP do Mecademic e executa o programa remotamente.
Você deve selecionar o pós-processador chamado Mecademic Python. As etapas a seguir resumem o procedimento para executar um arquivo PY no Mecademic.
1.Clique com o botão direito do mouse no programa e selecione Seleccionar Pós-processador
2.Selecione Mecademic Python
3.Clique com o botão direito do mouse no programa e selecione Gerar programa do robô (F6)
4.Salve o arquivo PY gerado no disco.
5.Abra e execute o arquivo PY em seu IDE ou execute-o diretamente em seu ambiente Python.
Executar programa do RoboDK
Os drivers do robô oferecem uma alternativa à programação off-line (em que um programa é gerado e, em seguida, transferido para o robô e executado). Você pode executar uma simulação do RoboDK diretamente no robô (Programação Online). Mais informações estão disponíveis na seção Robot Drivers.
Siga estas etapas para se conectar ao robô a partir do RoboDK:
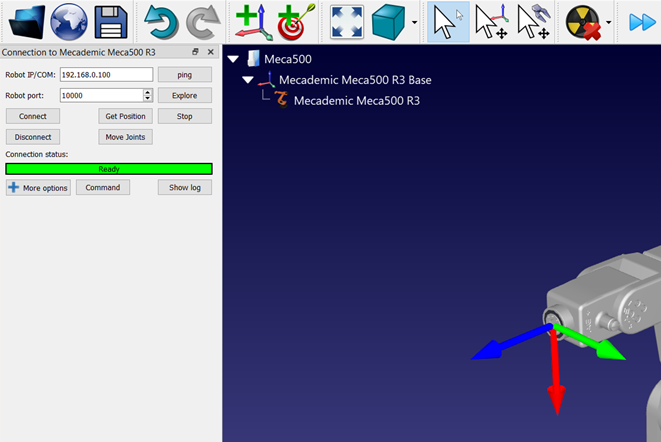
1.Clique com o botão direito do mouse no robô no RoboDK
2.Selecione: 
3.Digite o IP do robô
4.Selecione Conectar.
Deve haver uma mensagem verde exibindo Pronto se a conexão for bem-sucedida.
O robô pode ser movido selecionando Obter posições de eixos, Mover Eixos, no menu de conexão.
Há dois métodos diferentes para executar o programa do PC para o robô:
1.Executar no robô, passo a passo, com feedback no RoboDK (Programação on-line):
Esse método usa o robô como um servidor e cada instrução é enviada ao robô passo a passo à medida que é executada no simulador. Esse método é útil para fins de depuração.
a.Clique com o botão direito do mouse no programa (Print3D, neste exemplo)
b.Selecione Executar no robô
c.Clique duas vezes no programa para iniciá-lo (ou clique com o botão direito do mouse e selecione Executar)
Quando essa opção estiver marcada, ela se conectará ao robô real sempre que clicarmos duas vezes em um programa (ou clicarmos com o botão direito do mouse e selecionarmos Executar)
Essas operações também estão disponíveis na API do RoboDK e permitem a integração da programação do robô com outros aplicativos. A API está disponível em Python, C# e outras linguagens de programação.
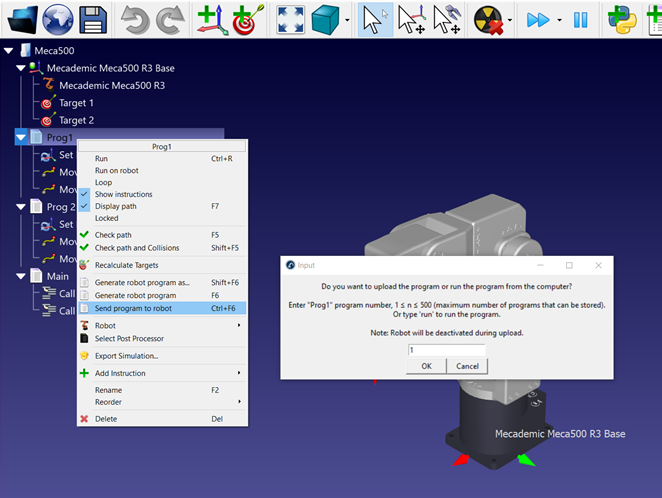
2.Envie o programa para o robô usando os pós-processadores Mecademic. Ele pode ser usado para executar o programa no robô, especificando "run" como o número do programa. O programa completo também pode ser salvo no controlador do robô como um programa off-line (consulte Programação off-line do robô):
a.Clique com o botão direito do mouse no programa (Prog1, neste exemplo)
b.Selecione Enviar programa para o robô (Ctrl+F6).
Outras dicas
Esta seção fornece outras informações úteis para a programação dos robôs Mecademic Meca500.
Programas off-line
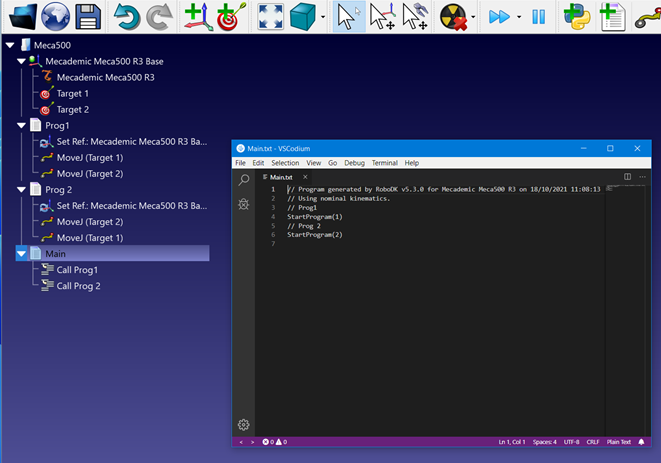
Os programas off-line são persistentes no robô e podem ser chamados usando seu respectivo número de programa. Você pode automatizar a seleção do número do programa adicionando-o ao nome do programa.
O RoboDK recuperará automaticamente o ID e o usará para chamar o programa. Isso também se aplica às sub-rotinas, veja o exemplo abaixo.
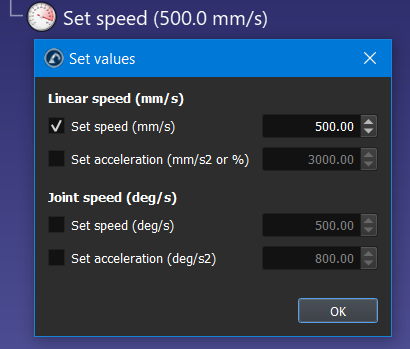
Unidades de velocidade
As unidades de velocidade de eixo e de aceleração linear e de eixos para robôs Mecademic devem ser fornecidas como um valor percentual (%), ao contrário de outras unidades exibidas no menu de instruções de velocidade definida.
A velocidade linear está correta e precisa ser fornecida em mm/s.